JITEN
最終更新:
![]() tattatatakemori 2014年12月15日(月) 22:21:26履歴
tattatatakemori 2014年12月15日(月) 22:21:26履歴
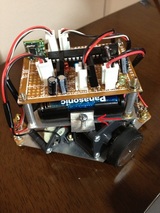
初めて制作したロボット。
回転式ライントレーサー。
マシンデータ
走行動画
関連記事
コメント
回転式ライントレーサー。
マシンデータ 
| Name | JITEN |
| Processor | AVR ATmega168P |
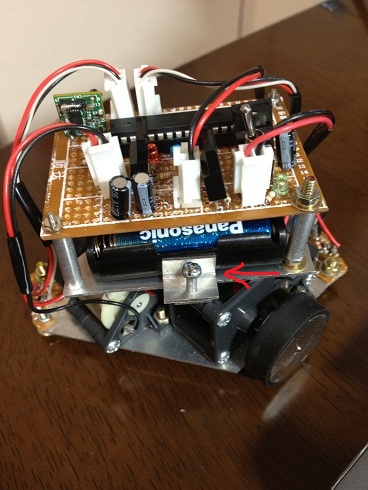
| Moter | タミヤハイパワーギヤボックス |
| LineSensor | RPR-220 x 2 |
走行動画
関連記事
ラインの追従方法や十字路の突破方法について
コメント
初めて製作したロボットなので思い出深い。
名前は自転公転の自転から。
前にセンサーを並べるという一般的な方法じゃなくてもライントレースできるだろうと考えてつくったもの。
タミヤのギヤボックスとフォトリフレクタ2つだけというシンプルな構成。
十字路をいかにして突破するかがポイント。
回転が始まってから140度くらいまではラインを無視している。
そのせいで内側を走る場合はR15までしか突破できない。
名前は自転公転の自転から。
前にセンサーを並べるという一般的な方法じゃなくてもライントレースできるだろうと考えてつくったもの。
タミヤのギヤボックスとフォトリフレクタ2つだけというシンプルな構成。
十字路をいかにして突破するかがポイント。
回転が始まってから140度くらいまではラインを無視している。
そのせいで内側を走る場合はR15までしか突破できない。