OmnimO-2
最終更新:
![]() tattatatakemori 2015年03月22日(日) 18:31:18履歴
tattatatakemori 2015年03月22日(日) 18:31:18履歴
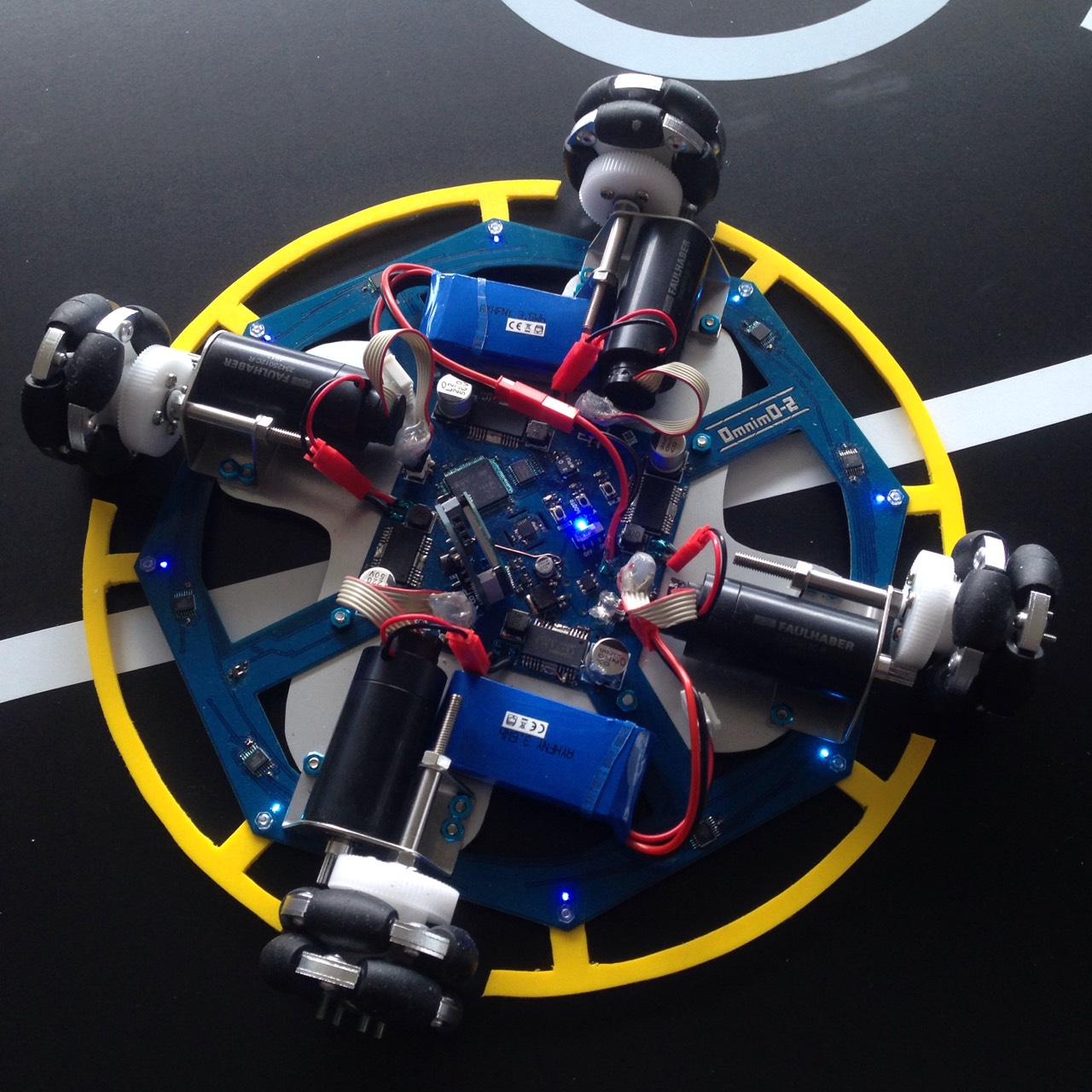
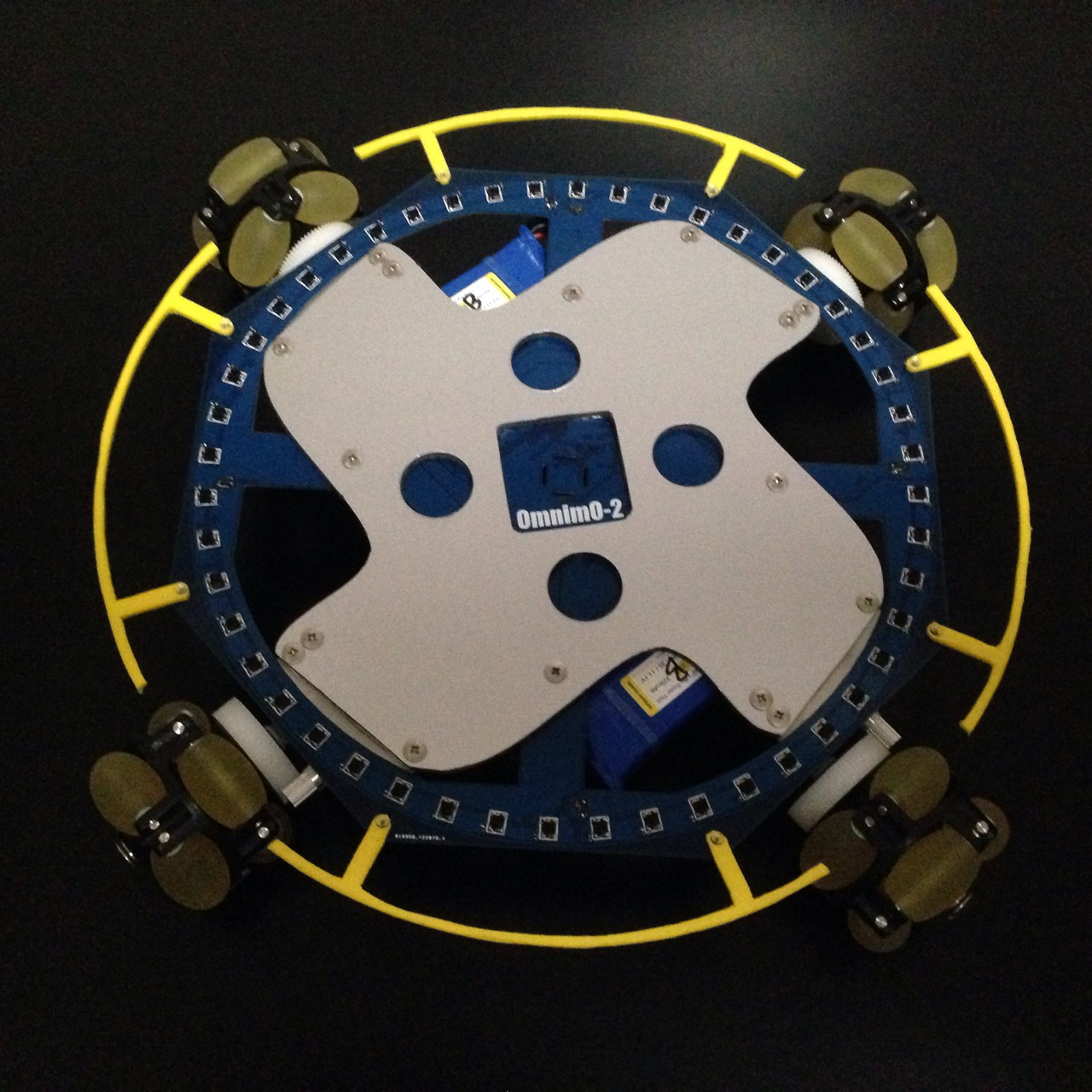
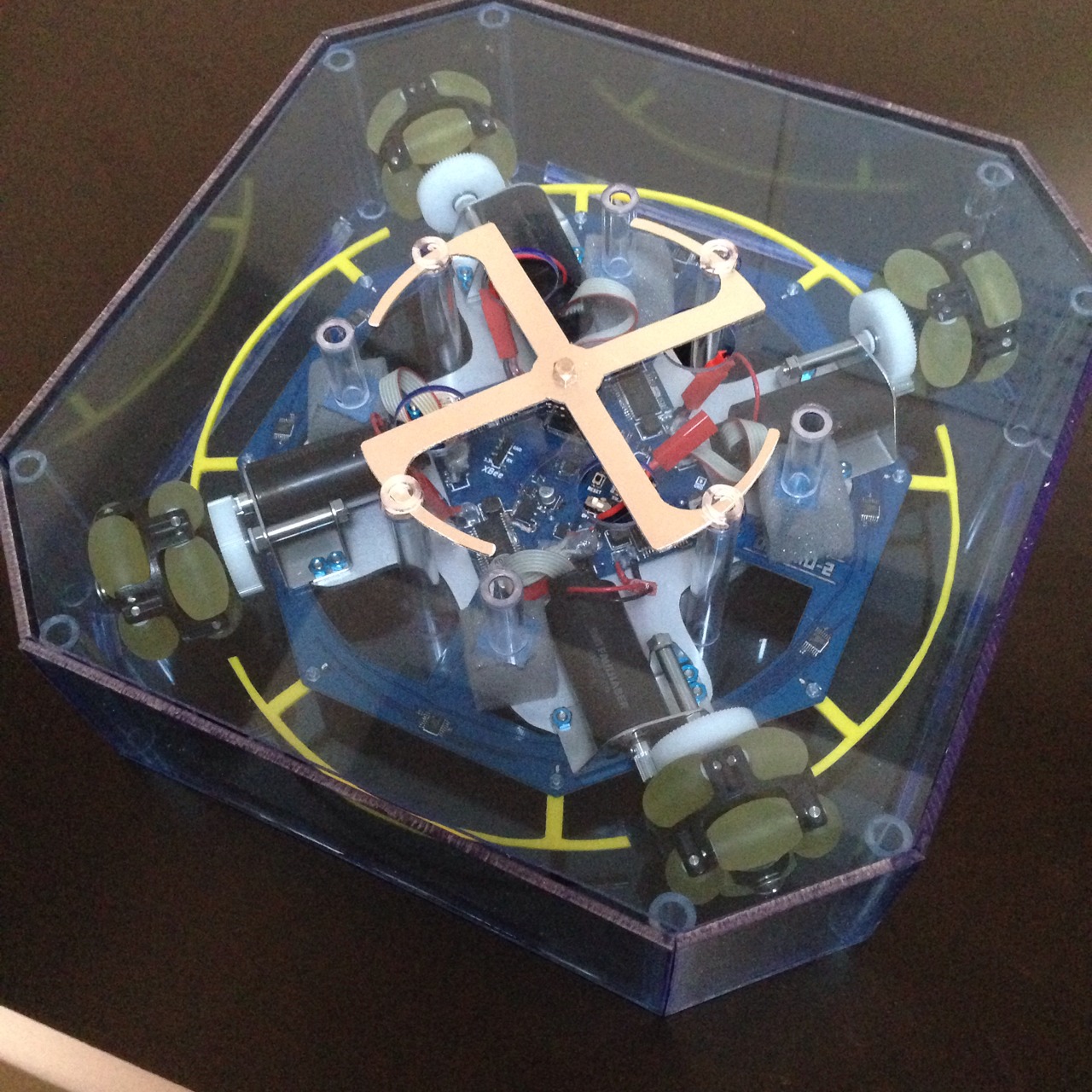
オムニホイール4輪を用いた全方向移動型ロボトレーサー。向きを変えずに走行する。
コースのマッピング、および作成したマップを用いた加減速走行やショートカット走行をすることができる。
マシンデータ

写真


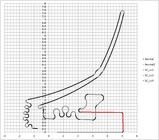
OmnimO-2が走行して作成した全日本大会2014の決勝コースのマップ
動画
戦績
関連記事
コメント
コースのマッピング、および作成したマップを用いた加減速走行やショートカット走行をすることができる。
マシンデータ 
| Name | OmnimO-2(オムニモ ツー) |
| Width | 245mm |
| Length | 245mm |
| Height | 48mm |
| Weight | 900g |
| Wheel old | d:48mm w:35mm オムニホイールTD48(土佐電子) |
| Wheel new | d:48mm w:24.5mm 48mmダブルアルミオムニホイール(Vstone) |
| Processor | STM32F405LQFP100 |
| Motor | FAULHAVER 2342S012CR |
| Encoder | FAULHAVER IE2-1024 |
| Battery | Hyperion LiPo 320mAh 3cell * 2 |
| Motor Driver | TB6549 |
| LineSensor | GP2S700 x 48 |
| A/D-Converter | ADC128S102 |
| GyroSensor | MPU-6000 |
| Top Speed | 3.5m/s?? |
| Acceleration | 4.0m/s/s |
写真
OmnimO-2が走行して作成した全日本大会2014の決勝コースのマップ

動画
マイクロマウス全日本大会2014決勝コース試走
マイクロマウス全日本大会2014予選コース試走(直線の向きに合わせた姿勢制御)
ショートカットのテスト@自宅廊下
回転走行の実験
角度制御のテスト
マイクロマウス全日本大会2014予選コース試走(直線の向きに合わせた姿勢制御)
ショートカットのテスト@自宅廊下
回転走行の実験
角度制御のテスト
戦績
2014 マイクロマウス関西地区大会 ロボトレースの部 特別賞
2014 マイクロマウス中部地区大会 ロボトレースの部 8位/11機出走
2014 マイクロマウス全日本学生大会 ロボトレースの部 19位/41機出走
2014 マイクロマウス全日本大会 ロボトレースの部 27位(特別枠で決勝進出)
2014 マイクロマウス中部地区大会 ロボトレースの部 8位/11機出走
2014 マイクロマウス全日本学生大会 ロボトレースの部 19位/41機出走
2014 マイクロマウス全日本大会 ロボトレースの部 27位(特別枠で決勝進出)
関連記事
コメント
オムニホイール4輪を用いた全方向移動型ロボトレーサーである。周囲に48個のフォトリフレクタがついている。
初代のOmnimOではコース記憶ができなかったので、オムニホイールを使ったうえでロボトレーサーとして一人前の機能を持たせようと思い制作するに至った。
OmnimOと違いちゃんとエンコーダとジャイロセンサを搭載しており駆動系や姿勢の制御がまともになった。
全方向移動の特徴として基本的に回転しないことを利用し、ジャイロセンサを一番低い測定レンジで使用することでマップの精度が向上した。
全日本大会2014決勝の約45mのコースを約50秒かけて探索した場合スタートとゴールの座標のずれは20cm程度である。
そのような正確なマップを利用したショートカット走行の実現を目指した。家のコースではショートカットに成功していたが、大会では一度も決めることができず、完成度は高くなかったと言える。
また4輪で加速する向きはタイヤの接地が均等でないために安定度が低い。加速する前に2輪で加速する向きに回転するなどの工夫も行った。
初代のOmnimOではコース記憶ができなかったので、オムニホイールを使ったうえでロボトレーサーとして一人前の機能を持たせようと思い制作するに至った。
OmnimOと違いちゃんとエンコーダとジャイロセンサを搭載しており駆動系や姿勢の制御がまともになった。
全方向移動の特徴として基本的に回転しないことを利用し、ジャイロセンサを一番低い測定レンジで使用することでマップの精度が向上した。
全日本大会2014決勝の約45mのコースを約50秒かけて探索した場合スタートとゴールの座標のずれは20cm程度である。
そのような正確なマップを利用したショートカット走行の実現を目指した。家のコースではショートカットに成功していたが、大会では一度も決めることができず、完成度は高くなかったと言える。
また4輪で加速する向きはタイヤの接地が均等でないために安定度が低い。加速する前に2輪で加速する向きに回転するなどの工夫も行った。