
XT-1 
マシンデータ
| Name | XT-1 |
| View | 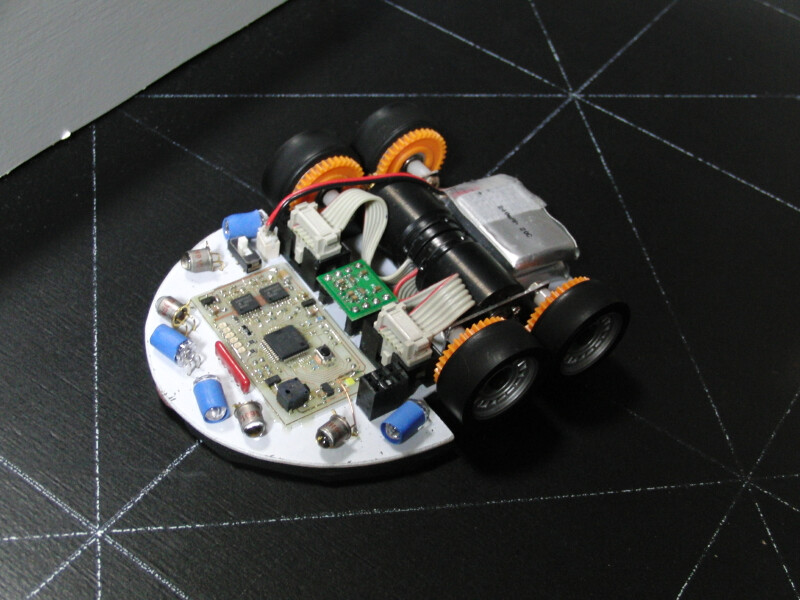 |
| Width | 75mm |
| Length | 95mm |
| Height | 22mm |
| Weight | 85g |
| Wheel | d:22mm w:8mm Mini'z Tire |
| Processor | STM32(64MHz) |
| Motor | FAULHABER 1717-003SR + IE2-512 |
| Battery | Li-ion 240mAh 2cell |
| Motor Driver | A3950 |
| Sencer | infrared light sencer (SFH4550 + TPS601) x 4 |
| Top Speed | 4000 m/s |
| Acceleration | 11000 m/s^2 |
| Turn Speed | 1400 m/s |
| UserInterface | push sw x 1, LED x 6 |
戦跡
2009年 台湾マイクロマウス大会 第2位
2009年 中部地区マイクロマウス大会 第1位
一言
名前は「eXperimental Tetra - 1」より。その名のとおりTetraの雛形である。
STM32の導入に当たって技術実証機として製作されたものだったが、想像以上の性能を発揮したことと、後継機の開発の遅れにより、かなりの活躍を見せてくれた。
サンハヤトの感光基板で作られており、かなり低コスト。部品の使いまわしあってのものですが・・・
極限まで絞られた回路構成で軽量な機体を実現している。
最大の特徴は4輪であること。原案はご存知綿谷さん。この構成は自分の求める方向性と非常にマッチしていた。(吸引は有効だが、あまり好みでなかった)
メリットをざっと挙げると、加減速時に荷重の抜けがないこと、ターン時に100%のグリップを使えること、機体が前後にカタつかないこと、角速度をゼロに近づける力が常に働くことなど。
ただし、当然ながら扱いは難しくなる。特に、ジャイロが無ければ正常にターンすることも難しい。
STM32の導入に当たって技術実証機として製作されたものだったが、想像以上の性能を発揮したことと、後継機の開発の遅れにより、かなりの活躍を見せてくれた。
サンハヤトの感光基板で作られており、かなり低コスト。部品の使いまわしあってのものですが・・・
極限まで絞られた回路構成で軽量な機体を実現している。
最大の特徴は4輪であること。原案はご存知綿谷さん。この構成は自分の求める方向性と非常にマッチしていた。(吸引は有効だが、あまり好みでなかった)
メリットをざっと挙げると、加減速時に荷重の抜けがないこと、ターン時に100%のグリップを使えること、機体が前後にカタつかないこと、角速度をゼロに近づける力が常に働くことなど。
ただし、当然ながら扱いは難しくなる。特に、ジャイロが無ければ正常にターンすることも難しい。

最新コメント