Tetra 
マシンデータ
| Name | Tetra |
| View | 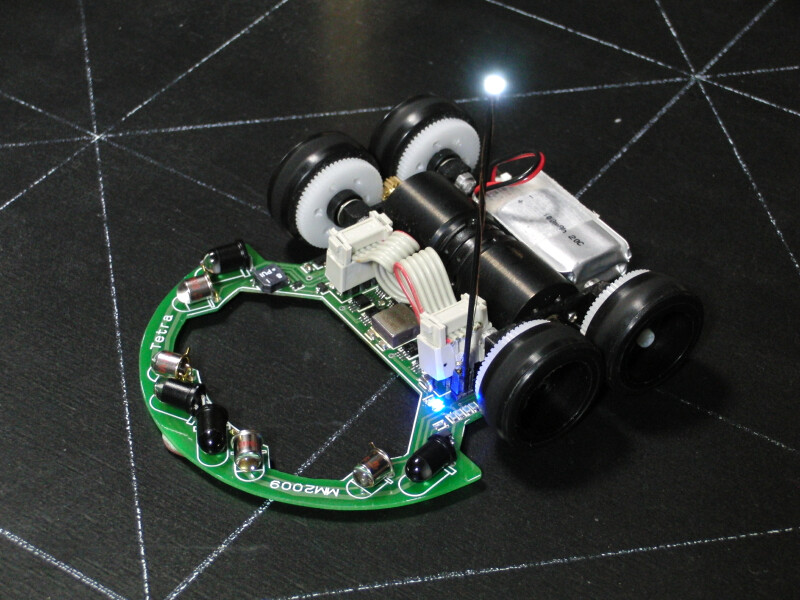 |
| Width | 74mm |
| Length | 90mm |
| Height | 22mm |
| Weight | 71g |
| Wheel | d:22mm w:8.5mm Mini'z Tire |
| Processor | STM32(64MHz) |
| Motor | FAULHABER 1717-003SR + IE2-512 |
| GearRatio | 16:60 |
| Battery | Li-ion 70mAh 2cell |
| Motor Driver | LTC4442 + ECH8659 |
| PWM Freq. | 64kHz |
| Sensor | infrared light sensor (SFH4550 + TPS601) x 4 |
| Gyro | ADXRS610 |
| Top Speed | 4500 m/s |
| Acceleration | 15000 m/s^2 |
| Turn Speed | (90L)1600mm/s, (90V)1350mm/s, (180)1400mm/s, (45)1600mm/s, (135)1350mm/s |
| UserInterface | push sw x 1, 2colorLED x 3 |
戦跡
2010年 全日本マイクロマウス大会クラシック競技エキスパートクラス 優勝
2010年 学生大会 クラシックマウス競技 優勝
2010年 中部地区大会 サーキット競技 優勝
2010年 中部地区大会 クラシックマウス競技 2位
2010年 関西支部復活記念大会 クラシックマウス競技 優勝
2009年 全日本マイクロマウス大会クラシック競技エキスパートクラス ニューテクノロジー賞
一言
XT-1を元に、徹底した軽量化、低重心、低慣性モーメント、モータードライバの強化を施した。
重量の半分以上をモーターが占める。これにより、質量の重心付近への集中と、高エネルギー効率を実現している。バッテリーの容量が小さくて済むのも、高効率ゆえである
実は初期のゲートドラバの選定がまずく、一度作り直す羽目になった。LTC4442は良かった。
機能面だけでなく、外観にも非常にこだわっている。そうでなくてはモチベーションが上がらない。
たとえばLEDは熱収縮チューブを被せるのではなく、先端だけマスキングしてつや消し黒で塗装した。エポキシによる固定も行っていない。このスピードで直接センサをぶつけるようなことがあれば、どのみちエポキシでは耐えられないという判断もあるが。
重量の半分以上をモーターが占める。これにより、質量の重心付近への集中と、高エネルギー効率を実現している。バッテリーの容量が小さくて済むのも、高効率ゆえである
実は初期のゲートドラバの選定がまずく、一度作り直す羽目になった。LTC4442は良かった。
機能面だけでなく、外観にも非常にこだわっている。そうでなくてはモチベーションが上がらない。
たとえばLEDは熱収縮チューブを被せるのではなく、先端だけマスキングしてつや消し黒で塗装した。エポキシによる固定も行っていない。このスピードで直接センサをぶつけるようなことがあれば、どのみちエポキシでは耐えられないという判断もあるが。
基板

部品数の削減、小型パッケージの採用により、実装面積をギリギリまで減らしている。
裏面には一切部品は使っていない。昔コンデンサを吹っ飛ばされた嫌な思い出があるからである。