P.5
3. LokSoundの基本
3.1。 機関車の音響特性
3.1.1。 蒸気機関車

蒸気機関車の主な音は、機関車が動いているときのボイラーのヒス音と排気口です。 チャフはドライバーの回転に同期しているため、機関車の速度が速くなったり遅くなったりすると、加速または減速します。 2気筒または4気筒の機関車と3気筒の機関車を区別します。 3気筒の蒸気機関車は、ドライバーの1回転あたり3または6排気チャフを生成し、2または4気筒の機関車は1回転あたり4排気チャフを生成します。 排気チャフは、一定速度での通常の走行と比較して、加速中は大きくて硬いように見えます。 バルブが閉じられているときはいつでも、唯一の可聴ノイズは駆動ロッドのがちゃがちゃという音です。
機関車が動き始めると、シリンダーバルブが開いて凝縮した蒸気を押し出し、駆動ロッドの破損を防ぎます。
この動作は、LokSoundデコーダーとLokProgrammerを使用してシミュレートできます。 個々の段階は、個別の運転ノッチに分割されます。 各ステージの異なる音は、排気チャフの個々の録音で構成されています(詳細な説明については、図4および11.5章も参照してください)。

図4:蒸気機関車の性能
3.1.2。 ディーゼル機関車(ディーゼル電気)

ディーゼル電気機関車は、原則として、ディーゼルエンジンを動力源とする発電機を備えた電気機関車です。 ディーゼル機関車は通常、機関車の速度に応じて一定の駆動ノッチで駆動されます。 そのため、発生するノイズは(駆動)ステップごとに変化します。 静かな電気モーターは、ディーゼル発電所の騒音に対してほとんど聞こえません。 ほとんどのディーゼル電気機関車には、4〜8個のスロットルノッチがあります。
ディーゼル電気機関車の例は、DBクラス232(「Ludmilla」)、GEまたはALCOによるほとんどのアメリカのディーゼル機関車、またはデンマーク国鉄によるMZ機関車です。
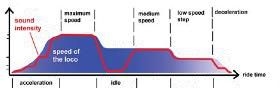
図5:ディーゼル電気機関車の性能
P.63.1.3。 ディーゼル機関車(ディーゼル油圧)

ディーゼル油圧機関車の主要な機器は、動力伝達に流体を使用するトルクコンバーターです。 このエネルギーの流れは文字通り「流fluent」です。
それが、スロットルが開かれ、機関車が実際に移動する前に、ディーゼル油圧機関車が音を立ててハウリングする理由です。 モーターの音の回転数は速度に依存するため、運転中に生成されるノイズは可聴しきい値なしで変化します。 簡単に言えば、音は速度に直接比例します。
LokSoundデコーダーを搭載した機関車は同じように動作します。 最初にディーゼルエンジンが回転し、回転数が十分に高くなると機関車が動き始めます。 音のピッチは、速度に応じて調整できます。 これは、複合ユニットでのみ可能です(デコーダーとサウンドモジュールを1つに–詳細については、8.5.4章も参照してください)。 ディーゼル油圧機関車の例は、DBクラスV200(クラス220)およびSNCB / NMBSによるレジオシャトルまたはDMU41です。

図6:ディーゼル油圧機関車の性能
3.1.4。 手動変速機付きディーゼル機関車(手動ギアギアボックス)

マニュアルトランスミッションを備えたディーゼル機関車は、自動車と同様にモーターから車輪に動力を伝達するためにピニオンギアを採用しています。 あるギアから次のギアへのシフト中にクラッチが押されるため、動力伝達が短時間中断されます。 ギアのシフトは、マニュアルトランスミッションを備えた多くのディーゼル機関車ではっきりと聞こえます。 LokProgrammerソフトウェアを使用すると、ギアシフトの元のサウンドを保存するか、9.6.2章で説明するオプション「ギアシフト」(ユーザーサウンドスロット14)を選択できます。
手動変速機は、比較的軽量で最高速度が低い車両でのみ実用的であるため、手動変速機を備えたディーゼル機関車の例は、ドイツの鉄道車両VT95またはシャント機関車です。

図7 .:手動変速機付きディーゼル機関車の性能
3.1.5. Electric locomotive

電気機関車にはさまざまな音の種類があります。 一方、電気駆動モーターのハム音が聞こえます。 ディーゼル油圧機関車と同様の速度でピッチを変更します。
他の電気機関車は、非常に支配的なファン音を生成します。 一部の電気機関車では、ファンの音は一定であるため、運転中に音は変化しません。 概して、電気機関車は他の機関車タイプほど騒音が少ないため、ホイッスル、ホーン、コンプレッサーなどのユーザーサウンドの適用に最適です(詳細については、9.5および9.6章を参照してください)。

図8:電気機関車の性能
3.2。 ユーザー定義の音

ユーザー定義の音(「User-Sounds」)は、ホーンとホイッスル、カプラーの鳴き声、サンディングなどです。これらの音は、デコーダーにプログラムした後、スロットルの機能ボタンを押すことでトリガーできます。 現在、LokSoundデコーダーは、ヘッドライト、スモークジェネレーターなど、最大28の機能をサポートしています。ESUECoSなどのデジタルコマンドステーションの最新バージョンは、この範囲を完全に活用できます。
P.73.3。 自動/ランダム音
3.4。 デジタルシステム/プロトコル
3.4.1。 DCC(NMRA)
3.4.2。 モトローラ®
3.4.3. M4
3.4.4。 Selectrix®
3.5。 CV
3.5.1定義とアプリケーション
3.6。 LokSoundデコーダーに関する詳細情報
3.6.1。 全般

LokSoundデコーダーの中核には強力なプロセッサーがあります。 これは、オーディオアンプと最大268.44秒のサウンドを保存できるサウンドメモリによってサポートされています。
アクティブフィルターを備えた8チャンネルミキサーは、8種類のサウンドを同時に再生できます。1チャンネルは運転音用に予約され、他の7チャンネルは他の音(ベル、ホイッスルなど)、ランダムサウンド(例:自動安全用) バルブまたはシャベルの石炭)、ブレーキ音。 8つのチャンネルすべてがデコーダーの1つの出力にミックスされ、スピーカーに送信されます。
LokSoundデコーダーのメモリはいつでも削除して、新しいサウンド用のスペースを空けることができます。 したがって、蒸気音デコーダをディーゼル音に変更することはまったく問題ありません。
ESU LokProgrammerを使用すると、いつでも簡単にそれを行うことができます。
注:この妨げられない音の変化は、ユーザーが機関車にインストールするために販売されているデコーダーに限定されます。 鉄道模型メーカーによって機関車に取り付けられているLokSoundデコーダーは、常にこのオプションを提供するとは限りません!
画面の下端にあるフィールドには、プログラミング中の使用可能なメモリ領域(秒とバイト単位)と特定のデコーダーの合計容量が表示されます。 これを確認するには、「サウンド」レジスタを選択してから、サウンド表示の1つを選択します(第9章も参照)。

一部のファイルを保存したいが、デコーダに十分なメモリスペースがない場合、このプロジェクトからいくつかのサウンドファイルを削除する必要があります。 または、オーディオプログラムを使用してサウンドフラグメントの一部を短くすることもできます。
3.6.2。 スピーカーを接続する
3.6.3。 適切な音
3.6.4サポートされているハードウェア
4. LokProgrammerソフトウェアの目的
4.1。 概要
4. 2.アシスタント
5.メイン画面
5.1。 ペインを表示
5.2。 タスクバー

図11。 タスクバー
•File:このメニューでは、プロジェクトで以下を実行できます。
New Project(新しいプロジェクト)、Open(開く)、Import Project (プロジェクトのインポート)(v3.5プロジェクトをv4.0プロジェクトに変換します(変換するプロジェクトは、最初にバージョン2.7.9またはバージョン4.7。+ソフトウェアにv3.5ファイルとして保存する必要があります)
インターネット更新機能(2.5を参照)を呼び出して、LokProgrammerソフトウェアを閉じることもできます。
ファイルの保存中に、すべてのデータ、設定、およびサウンドファイルがプロジェクトファイルに書き込まれます。 プロジェクトファイルは、v3.5デコーダーの場合は末尾が「.esu」、v4.0の場合は.esuxで保存されます。
•Programmer:ここでは、デコーダデータの読み取りと書き込み、およびサウンドファイルの書き込みができます。 デコーダのタイプやファームウェアのバージョン番号などの拡張デコーダデータもここで読むことができます。
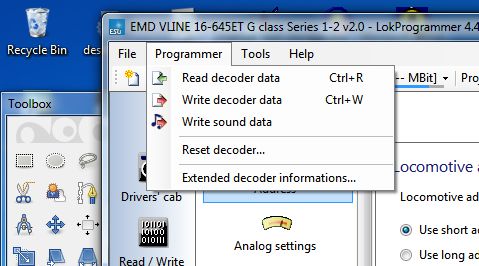
図.12:メニュー「プログラマー」
「Read Decoder Data」:デコーダーのデータを変更する前に、すべてのデコーダーデータを読み取ることをお勧めします。 機関車をプログラミングトラックに置き、プログラミングトラックが正しく接続されていることを確認します。
次に、画面上部のタスクバーで[デコーダデータの読み取り]をクリックします。 プログラムはすぐにデータの読み取りを開始します。 この処理には1〜2分かかることがあります。しばらくお待ちください。 ステータスは進行状況バーに表示されます。
「Write Decoder Data」:プロジェクトファイルに含まれるCVは、LokProgrammerに接続されたデコーダに書き込まれます。 CVを書き込むために最初に開くウィンドウで[続行]をクリックします。 デコーダー上のすべてのデータが新しいデータに置き換えられます。
「Write Sound Data」:サウンドプロジェクト全体がこのコマンドを使用してデコーダーに書き込まれ、すべてのサウンドデータが置き換えられます。 部分的なサウンド情報を書き込むことはできません。したがって、このコマンドを使用するには、ファイルメニューを使用して、デコーダーのプロジェクトファイルを最初に開く必要があります。 このコマンドを発行すると、すぐにサブメニューダイアログが開きます:(次の列)
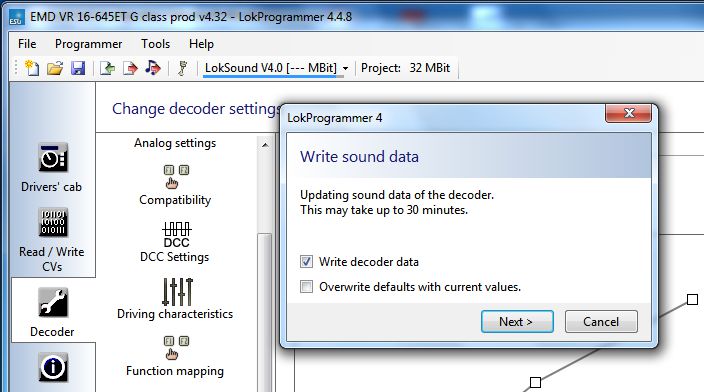
図13:サウンドデータの書き込み「プログラマー」
「Write decoder data」(デコーダデータの書き込み)をオンにすると、プロジェクト内のデコーダデータが最初に書き込まれ、続いて音声が書き込まれます。 「Overwrite defaults with current values」(現在の値でデフォルトを上書きする)がチェックされている場合、現在のデコーダデータは、コマンド「reset decoder ,,,」が発行されたときのデフォルトになります。 [次へ]をクリックすると、情報の書き込みが開始され、書き込み中のサウンドデータの量に応じて、完了まで最大30分かかります。
「Reset Decoder」:「Overwrite defaults」が以前に使用されていた場合、デコーダを工場出荷時のデフォルトまたは現在のデフォルトにリセットします。
5.3。 ツール
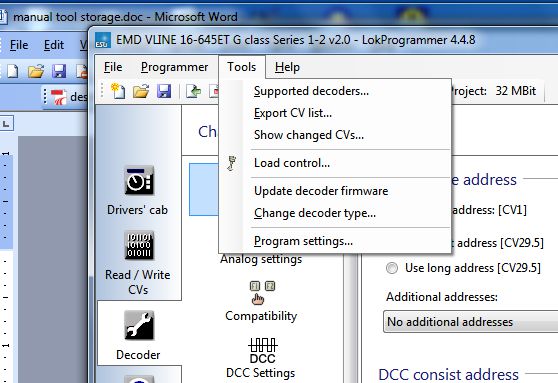
図14:メニュー「ツール」
[ツール]メニューには、現在のデコーダーに関する情報を提供するオプションがあり、作業中の現在のデコーダーに関して特定のアクションを実行できます(次のページを参照)
3. LokSoundの基本 
次の章では、LokSoundデコーダーが典型的なサウンドを再現する方法、モデルトレインのデジタルコマンド制御で利用可能なオプション、および現在市場で利用可能なデジタルシステムのプロトコルについて説明します。 すでにデジタルシステムの使用経験があり、機関車の音に精通している場合は、この章をスキップして16ページをお読みください。
3.1。 機関車の音響特性
LokProgrammerおよびLokSoundデコーダーを使用すると、蒸気機関車、ディーゼル油圧およびディーゼル電気機関車、電気機関車または手動変速機付きの機関車(鉄道車両など)の音を再生できます。 もちろん、音のシーケンスは機関車の種類に左右されます。
3.1.1。 蒸気機関車
蒸気機関車の主な音は、機関車が動いているときのボイラーのヒス音と排気口です。 チャフはドライバーの回転に同期しているため、機関車の速度が速くなったり遅くなったりすると、加速または減速します。 2気筒または4気筒の機関車と3気筒の機関車を区別します。 3気筒の蒸気機関車は、ドライバーの1回転あたり3または6排気チャフを生成し、2または4気筒の機関車は1回転あたり4排気チャフを生成します。 排気チャフは、一定速度での通常の走行と比較して、加速中は大きくて硬いように見えます。 バルブが閉じられているときはいつでも、唯一の可聴ノイズは駆動ロッドのがちゃがちゃという音です。
機関車が動き始めると、シリンダーバルブが開いて凝縮した蒸気を押し出し、駆動ロッドの破損を防ぎます。
この動作は、LokSoundデコーダーとLokProgrammerを使用してシミュレートできます。 個々の段階は、個別の運転ノッチに分割されます。 各ステージの異なる音は、排気チャフの個々の録音で構成されています(詳細な説明については、図4および11.5章も参照してください)。
図4:蒸気機関車の性能
3.1.2。 ディーゼル機関車(ディーゼル電気)
ディーゼル電気機関車は、原則として、ディーゼルエンジンを動力源とする発電機を備えた電気機関車です。 ディーゼル機関車は通常、機関車の速度に応じて一定の駆動ノッチで駆動されます。 そのため、発生するノイズは(駆動)ステップごとに変化します。 静かな電気モーターは、ディーゼル発電所の騒音に対してほとんど聞こえません。 ほとんどのディーゼル電気機関車には、4〜8個のスロットルノッチがあります。
ディーゼル電気機関車の例は、DBクラス232(「Ludmilla」)、GEまたはALCOによるほとんどのアメリカのディーゼル機関車、またはデンマーク国鉄によるMZ機関車です。
図5:ディーゼル電気機関車の性能
P.6
3.1.3。 ディーゼル機関車(ディーゼル油圧)
ディーゼル油圧機関車の主要な機器は、動力伝達に流体を使用するトルクコンバーターです。 このエネルギーの流れは文字通り「流fluent」です。
それが、スロットルが開かれ、機関車が実際に移動する前に、ディーゼル油圧機関車が音を立ててハウリングする理由です。 モーターの音の回転数は速度に依存するため、運転中に生成されるノイズは可聴しきい値なしで変化します。 簡単に言えば、音は速度に直接比例します。
LokSoundデコーダーを搭載した機関車は同じように動作します。 最初にディーゼルエンジンが回転し、回転数が十分に高くなると機関車が動き始めます。 音のピッチは、速度に応じて調整できます。 これは、複合ユニットでのみ可能です(デコーダーとサウンドモジュールを1つに–詳細については、8.5.4章も参照してください)。 ディーゼル油圧機関車の例は、DBクラスV200(クラス220)およびSNCB / NMBSによるレジオシャトルまたはDMU41です。
図6:ディーゼル油圧機関車の性能
3.1.4。 手動変速機付きディーゼル機関車(手動ギアギアボックス)
マニュアルトランスミッションを備えたディーゼル機関車は、自動車と同様にモーターから車輪に動力を伝達するためにピニオンギアを採用しています。 あるギアから次のギアへのシフト中にクラッチが押されるため、動力伝達が短時間中断されます。 ギアのシフトは、マニュアルトランスミッションを備えた多くのディーゼル機関車ではっきりと聞こえます。 LokProgrammerソフトウェアを使用すると、ギアシフトの元のサウンドを保存するか、9.6.2章で説明するオプション「ギアシフト」(ユーザーサウンドスロット14)を選択できます。
手動変速機は、比較的軽量で最高速度が低い車両でのみ実用的であるため、手動変速機を備えたディーゼル機関車の例は、ドイツの鉄道車両VT95またはシャント機関車です。
図7 .:手動変速機付きディーゼル機関車の性能
3.1.5. Electric locomotive
電気機関車にはさまざまな音の種類があります。 一方、電気駆動モーターのハム音が聞こえます。 ディーゼル油圧機関車と同様の速度でピッチを変更します。
他の電気機関車は、非常に支配的なファン音を生成します。 一部の電気機関車では、ファンの音は一定であるため、運転中に音は変化しません。 概して、電気機関車は他の機関車タイプほど騒音が少ないため、ホイッスル、ホーン、コンプレッサーなどのユーザーサウンドの適用に最適です(詳細については、9.5および9.6章を参照してください)。
図8:電気機関車の性能
3.2。 ユーザー定義の音
ユーザー定義の音(「User-Sounds」)は、ホーンとホイッスル、カプラーの鳴き声、サンディングなどです。これらの音は、デコーダーにプログラムした後、スロットルの機能ボタンを押すことでトリガーできます。 現在、LokSoundデコーダーは、ヘッドライト、スモークジェネレーターなど、最大28の機能をサポートしています。ESUECoSなどのデジタルコマンドステーションの最新バージョンは、この範囲を完全に活用できます。
P.7
3.3。 自動/ランダム音
ランダムサウンドは自動的に不規則にトリガーされ、安全弁、ファン、コンプレッサーなどに使用できます。
LokProgrammerを使用すると、ランダムサウンド間の時間を選択できます(詳細は8.5.3章を参照)。
鳴きブレーキなど、サウンドを自動的にトリガーする他の可能性は、デコーダー設定と適切なフローチャートに含まれています(第9章を参照)。 そのような音は、それらの設定に基づいて特定の時間にトリガーされます。
LokProgrammerを使用すると、ランダムサウンド間の時間を選択できます(詳細は8.5.3章を参照)。
鳴きブレーキなど、サウンドを自動的にトリガーする他の可能性は、デコーダー設定と適切なフローチャートに含まれています(第9章を参照)。 そのような音は、それらの設定に基づいて特定の時間にトリガーされます。
3.4。 デジタルシステム/プロトコル
この章では、モデルトレインを実行し、LokProgrammerでサポートされている信号と分岐を設定するためのすべてのデジタルプロトコルをリストします。
3.4.1。 DCC(NMRA)
DCCは「デジタルコマンドコントロール」の略で、NMRA(National Model Railroad Association)によって標準として策定されました。
初期段階では、動作は14の速度ステップと80のアドレスに制限されていました。 現在、最大10,000個のアドレスと128個の速度ステップが使用可能です。
DCCは、制御およびデコーダーに関して下位互換性があります。 古いデコーダーは、最新のコマンドステーション/スロットルで制御でき、特定の制限がありますが、新しいデコーダーは古い制御装置で操作およびプログラムできます。
初期段階では、動作は14の速度ステップと80のアドレスに制限されていました。 現在、最大10,000個のアドレスと128個の速度ステップが使用可能です。
DCCは、制御およびデコーダーに関して下位互換性があります。 古いデコーダーは、最新のコマンドステーション/スロットルで制御でき、特定の制限がありますが、新しいデコーダーは古い制御装置で操作およびプログラムできます。
3.4.2。 モトローラ®
Motorola®プロトコルは1984年に遡り、鉄道模型用の最も古いデジタルシステムの1つです。 その年齢のために、運用オプションは限られています。
Motorola®プロトコルは、14の速度ステップで80の機関車アドレスのみを処理でき、ヘッドライト機能に加えて、4つの追加機能出力のみを制御できます(2番目のMotorola®アドレスで機能5〜8を選択できます)。
Motorola®プロトコルは多くのデジタルシステムでまだ使用されているため、ESUデコーダーはこのプロトコルでも動作するように設計されています。
Motorola®プロトコルは、14の速度ステップで80の機関車アドレスのみを処理でき、ヘッドライト機能に加えて、4つの追加機能出力のみを制御できます(2番目のMotorola®アドレスで機能5〜8を選択できます)。
Motorola®プロトコルは多くのデジタルシステムでまだ使用されているため、ESUデコーダーはこのプロトコルでも動作するように設計されています。
3.4.3. M4
2004年以降、MFX®システムが市場に出ています。 理論的には、これは16,000を超えるモデル機関車を128の速度ステップで同時に実行できます。
LokProgrammerソフトウェアは、DCCとは多少異なる特定の設定を処理します。
たとえば、機関車の住所の代わりに、機関車の名前を入力する必要があります(例:「クラス01」または「ICE」)。 特定のパラメータのCVへの割り当てもDCCとは異なります。
M4については、3.5章以降で言及したDCC-CVを使用しないでください!
M4の意味?
このマニュアルのある時点で、「M4」という用語に初めて気づき、これが何を意味するのか疑問に思うでしょう。
この質問には非常に簡単に答えることができます。2009年以降、M4は、ESUがデコーダーに実装するために選択したデータプロトコルの名前です。 M4プロトコルを使用したデコーダーは、mfx®を使用するコマンドステーションと100%互換性があります。 そのようなステーション(例:Märklin®CentralStation®)では、それらは自動的に認識され、すべての再生機能はmfx®を使用するときと同じように利用できます。 一方、M4を使用するESUコマンドステーションは、すべての(Märklin®およびESU)mfx®デコーダーを制限なく認識し、問題なく動作します。 mfx®の(相互の)発明者として、これを保証します。
要するに、テクニックは同じままで、名前だけが変更されています。
LokProgrammerソフトウェアは、DCCとは多少異なる特定の設定を処理します。
たとえば、機関車の住所の代わりに、機関車の名前を入力する必要があります(例:「クラス01」または「ICE」)。 特定のパラメータのCVへの割り当てもDCCとは異なります。
M4については、3.5章以降で言及したDCC-CVを使用しないでください!
M4の意味?
このマニュアルのある時点で、「M4」という用語に初めて気づき、これが何を意味するのか疑問に思うでしょう。
この質問には非常に簡単に答えることができます。2009年以降、M4は、ESUがデコーダーに実装するために選択したデータプロトコルの名前です。 M4プロトコルを使用したデコーダーは、mfx®を使用するコマンドステーションと100%互換性があります。 そのようなステーション(例:Märklin®CentralStation®)では、それらは自動的に認識され、すべての再生機能はmfx®を使用するときと同じように利用できます。 一方、M4を使用するESUコマンドステーションは、すべての(Märklin®およびESU)mfx®デコーダーを制限なく認識し、問題なく動作します。 mfx®の(相互の)発明者として、これを保証します。
要するに、テクニックは同じままで、名前だけが変更されています。
3.4.4。 Selectrix®
Selectrix®は別のデジタルシステムです。 DCCとは異なり、機関車の住所は個別に送信されるのではなく、グループで送信されます。 したがって、駆動音とランダム音に限定されますが、ユーザー定義の音(たとえば、whiやベル)をトリガーすることはできません。 Selectrix®は、ほぼNスケールとZスケールにのみ使用されます。 したがって、ESU LokSoundマイクロデコーダーでもサポートされます。
サウンドをプログラミングする際に、これらのシステムを混同しないことが重要です。 たとえば、M4プロジェクトファイルをDCCデコーダーに保存することはできません。もちろん、それらを再生することもできません。
サウンドをプログラミングする際に、これらのシステムを混同しないことが重要です。 たとえば、M4プロジェクトファイルをDCCデコーダーに保存することはできません。もちろん、それらを再生することもできません。
3.5。 CV
3.5.1定義とアプリケーション
CVは「構成変数」の略です。 CVは、ビットまたはバイト単位の値を持つことができます。 バイトを含むCVの範囲は0〜255で、ビットでプログラムされたCVはオン/オフスイッチとして機能します。
例:
CV 63(音量)は、最大値192でバイト単位でプログラムできるCVです。値0は無音を意味し、192は最大音量を表します。 (150%)
CV 49では、ビット0は負荷補正を有効にするための「スイッチ」です(8.3.2に従って)。 このビットを0に設定すると、負荷補正は無効になり、1に設定されると、負荷補正がアクティブになります。
NMRA(National Model Railroad Association)は、特定のCVを特定の機能に割り当てています。 たとえば、CV 1は常にアドレスに使用され、CV 5は最大速度に使用されます。
長所/短所
デジタルデコーダーは、包括的なプログラミングの知識や機器を必要とせずにプログラミングできます。 多くのデジタルコマンドステーションには、内部プログラミングメニューも用意されています。
さらに、ビットとバイトを使用したプログラミングでは、メモリスペースがほとんど必要ありません。 CVのみを使用したプログラミングは覚えるのが容易ではなく、コマンドステーションの種類によっては非常に面倒な場合があります。
さらに、CVはLokSoundデコーダーのサウンドに対する効果が限られています(例:音量)。 実際の音はCVで調整することはできませんが、実際の録音に依存します。 LokProgrammerソフトウェアでは、CVはレジスターまたはスライドコントロールとして表示されるため、目的の値に簡単に設定できます。
例:
CV 63(音量)は、最大値192でバイト単位でプログラムできるCVです。値0は無音を意味し、192は最大音量を表します。 (150%)
CV 49では、ビット0は負荷補正を有効にするための「スイッチ」です(8.3.2に従って)。 このビットを0に設定すると、負荷補正は無効になり、1に設定されると、負荷補正がアクティブになります。
NMRA(National Model Railroad Association)は、特定のCVを特定の機能に割り当てています。 たとえば、CV 1は常にアドレスに使用され、CV 5は最大速度に使用されます。
長所/短所
デジタルデコーダーは、包括的なプログラミングの知識や機器を必要とせずにプログラミングできます。 多くのデジタルコマンドステーションには、内部プログラミングメニューも用意されています。
さらに、ビットとバイトを使用したプログラミングでは、メモリスペースがほとんど必要ありません。 CVのみを使用したプログラミングは覚えるのが容易ではなく、コマンドステーションの種類によっては非常に面倒な場合があります。
さらに、CVはLokSoundデコーダーのサウンドに対する効果が限られています(例:音量)。 実際の音はCVで調整することはできませんが、実際の録音に依存します。 LokProgrammerソフトウェアでは、CVはレジスターまたはスライドコントロールとして表示されるため、目的の値に簡単に設定できます。
3.6。 LokSoundデコーダーに関する詳細情報
3.6.1。 全般
LokSoundデコーダーの中核には強力なプロセッサーがあります。 これは、オーディオアンプと最大268.44秒のサウンドを保存できるサウンドメモリによってサポートされています。
アクティブフィルターを備えた8チャンネルミキサーは、8種類のサウンドを同時に再生できます。1チャンネルは運転音用に予約され、他の7チャンネルは他の音(ベル、ホイッスルなど)、ランダムサウンド(例:自動安全用) バルブまたはシャベルの石炭)、ブレーキ音。 8つのチャンネルすべてがデコーダーの1つの出力にミックスされ、スピーカーに送信されます。
LokSoundデコーダーのメモリはいつでも削除して、新しいサウンド用のスペースを空けることができます。 したがって、蒸気音デコーダをディーゼル音に変更することはまったく問題ありません。
ESU LokProgrammerを使用すると、いつでも簡単にそれを行うことができます。
注:この妨げられない音の変化は、ユーザーが機関車にインストールするために販売されているデコーダーに限定されます。 鉄道模型メーカーによって機関車に取り付けられているLokSoundデコーダーは、常にこのオプションを提供するとは限りません!
画面の下端にあるフィールドには、プログラミング中の使用可能なメモリ領域(秒とバイト単位)と特定のデコーダーの合計容量が表示されます。 これを確認するには、「サウンド」レジスタを選択してから、サウンド表示の1つを選択します(第9章も参照)。
一部のファイルを保存したいが、デコーダに十分なメモリスペースがない場合、このプロジェクトからいくつかのサウンドファイルを削除する必要があります。 または、オーディオプログラムを使用してサウンドフラグメントの一部を短くすることもできます。
3.6.2。 スピーカーを接続する
スピーカーは音響機器の最終部品です。 もちろん、小型のスピーカーはモデル機関車にしか設置できません。
したがって、スピーカーは非常に厳しい仕様を満たす必要があります。 ESUは、さまざまなサイズのさまざまなデコーダータイプのスピーカーを提供しています。
LokSound v3.5デコーダーのオーディオ出力は100オーム用に設計されていますが、v4.0およびXLは4,8およびその他のオーム定格を必要とすることに注意してください。 特定のスピーカーの評価については、デコーダーをご覧ください。
P.8
したがって、スピーカーは非常に厳しい仕様を満たす必要があります。 ESUは、さまざまなサイズのさまざまなデコーダータイプのスピーカーを提供しています。
LokSound v3.5デコーダーのオーディオ出力は100オーム用に設計されていますが、v4.0およびXLは4,8およびその他のオーム定格を必要とすることに注意してください。 特定のスピーカーの評価については、デコーダーをご覧ください。
P.8
3.6.3。 適切な音
ESUは、ウェブサイトwww.esu.euで、あらゆる種類の機関車用のさまざまなサウンドファイルを提供しています。 サウンドファイルのダウンロードに関する付録に記載されているライセンス条件に注意してください。 もちろん、LokSoundデコーダーで独自のサウンドプロジェクトをプログラムできます。
通常、LokSoundデコーダーにはWindows * .wav形式のすべてのファイルを使用できます。 WAVは、あらゆる種類のサウンドをウィンドウに保存するための標準形式です。 録音がノイズの場合、音楽や音声は問題になりません。
ファイルは、LokProgrammerに付属のCD-ROMから作成することも、インターネットからダウンロードすることも、ユーザーが作成することもできます。
波形ファイルは、さまざまなレベルの音質でハードディスクに保存できます。 音質が良いほど、より多くのメモリスペースが必要です。
最適な音質を実現するには、wavファイルをCD品質(44100hz / 16bit)で記録および編集する必要があります。 プログラムは、ファイルを特定のデコーダーに合った適切な形式に自動的に変換します。
ヒント:
v4デコーダーアーキテクチャの出現により、新しい高機能変換ユーティリティがプログラマーソフトウェアに含まれているため、CD品質(44100hz / 16ビット、ステレオまたはモノラル)での録音と編集により、すべてのv4.0デコーダーの最高のオーディオ品質が実現します。 サウンドプロジェクトにインポートされたファイルを変換するためのプログラマソフトウェア。 このマニュアルでは、サウンドをデジタルファイルに編集または変換する方法、およびそれらをハードディスクに保存する方法に関する包括的な指示は提供できません。 PCまたはオーディオカード、録音デバイス、およびユーザーが作成したサウンドをキャプチャして生成するために使用しているサウンド編集ソフトウェアに付属のマニュアルを参照してください。
通常、LokSoundデコーダーにはWindows * .wav形式のすべてのファイルを使用できます。 WAVは、あらゆる種類のサウンドをウィンドウに保存するための標準形式です。 録音がノイズの場合、音楽や音声は問題になりません。
ファイルは、LokProgrammerに付属のCD-ROMから作成することも、インターネットからダウンロードすることも、ユーザーが作成することもできます。
波形ファイルは、さまざまなレベルの音質でハードディスクに保存できます。 音質が良いほど、より多くのメモリスペースが必要です。
最適な音質を実現するには、wavファイルをCD品質(44100hz / 16bit)で記録および編集する必要があります。 プログラムは、ファイルを特定のデコーダーに合った適切な形式に自動的に変換します。
ヒント:
v4デコーダーアーキテクチャの出現により、新しい高機能変換ユーティリティがプログラマーソフトウェアに含まれているため、CD品質(44100hz / 16ビット、ステレオまたはモノラル)での録音と編集により、すべてのv4.0デコーダーの最高のオーディオ品質が実現します。 サウンドプロジェクトにインポートされたファイルを変換するためのプログラマソフトウェア。 このマニュアルでは、サウンドをデジタルファイルに編集または変換する方法、およびそれらをハードディスクに保存する方法に関する包括的な指示は提供できません。 PCまたはオーディオカード、録音デバイス、およびユーザーが作成したサウンドをキャプチャして生成するために使用しているサウンド編集ソフトウェアに付属のマニュアルを参照してください。
3.6.4サポートされているハードウェア
バージョン2.5.0以降のLokProgrammerソフトウェアは、LokProgrammer 53450「LokProgrammer V3.0」のみをサポートしています。
サポートされるデコーダーの数は、LokProgrammerのバージョンによって異なります。
2.6.1のバージョンは、次のESUデコーダーをサポートしています。
•0スケールおよびH0スケール用の8および16 MBitエモリーを備えたLokSound V3.5(DCCおよびMotorola®)
•TTおよびNスケール用LokSound micro(DCC、Motorola®およびSelectrix®)
•GおよびIゲージ用のLokSoundXL V3.5(DCCおよびMotorola®)
•Märklin®システムのユーザー向けの0およびH0スケールのLokSound M4。
さらに、次のもの(一部は古い製品バージョン)がサポートされています。
LokSound V3.0、LokSoundXL V3.0、LokSound2、LokSoundXL V2.0、LokPilot、LokPilotDCC、LokPilotXL、LokPilotXL DCC。
4.4.7のソフトウェアバージョンは、v3.5およびv4.0デコーダーをサポートします。
LokProgrammerソフトウェアは継続的な開発の対象です。 常に最新のソフトウェアバージョンを使用できるようにするには、インターネット更新機能を定期的に呼び出す必要があります。 拡張機能とバグ修正を備えた新しいバージョンが利用可能になるたびに、当社のWebサイトのダウンロードセクションに配置されます。
画面上の外観は、特定のデコーダーの機能によって変わる場合があります。 したがって、特定のケースでは、ここで説明した機能の一部のみがアクティブになるか、さらに多くのオプションが利用可能になる場合があります。 デコーダーに付属のマニュアルを常に参照してください。
サポートされるデコーダーの数は、LokProgrammerのバージョンによって異なります。
2.6.1のバージョンは、次のESUデコーダーをサポートしています。
•0スケールおよびH0スケール用の8および16 MBitエモリーを備えたLokSound V3.5(DCCおよびMotorola®)
•TTおよびNスケール用LokSound micro(DCC、Motorola®およびSelectrix®)
•GおよびIゲージ用のLokSoundXL V3.5(DCCおよびMotorola®)
•Märklin®システムのユーザー向けの0およびH0スケールのLokSound M4。
さらに、次のもの(一部は古い製品バージョン)がサポートされています。
LokSound V3.0、LokSoundXL V3.0、LokSound2、LokSoundXL V2.0、LokPilot、LokPilotDCC、LokPilotXL、LokPilotXL DCC。
4.4.7のソフトウェアバージョンは、v3.5およびv4.0デコーダーをサポートします。
LokProgrammerソフトウェアは継続的な開発の対象です。 常に最新のソフトウェアバージョンを使用できるようにするには、インターネット更新機能を定期的に呼び出す必要があります。 拡張機能とバグ修正を備えた新しいバージョンが利用可能になるたびに、当社のWebサイトのダウンロードセクションに配置されます。
画面上の外観は、特定のデコーダーの機能によって変わる場合があります。 したがって、特定のケースでは、ここで説明した機能の一部のみがアクティブになるか、さらに多くのオプションが利用可能になる場合があります。 デコーダーに付属のマニュアルを常に参照してください。
4. LokProgrammerソフトウェアの目的
次の章では、LokProgrammerのプログラム機能について説明します。まず一般的な機能、次にESUデコーダーを調整する特別な可能性(LokPilotおよびLokSound)について説明します。
各オプションのDCCプロトコルの適切なCVの名前と、どのESUデコーダーがどの設定をサポートしているかが示されます。 LPはLokPilot、LSはLokSoundを表します。
最新のファームウェアのみ、デコーダーの潜在的な機能を完全に利用できることに心に留めておいてください。
各オプションのDCCプロトコルの適切なCVの名前と、どのESUデコーダーがどの設定をサポートしているかが示されます。 LPはLokPilot、LSはLokSoundを表します。
最新のファームウェアのみ、デコーダーの潜在的な機能を完全に利用できることに心に留めておいてください。
4.1。 概要
•ESUデコーダーのすべてのパラメーターの設定/変更:すべてのオプションをPCで快適に設定できます。 もちろん、ESU ECoSコマンドステーションなどのデジタルコマンドステーションを介してCVを手動で調整することも可能です。
•ESU LokSoundモジュールに保存されているサウンドファイルの変更:LokSoundモジュール上のすべてのサウンドファイルをいつでも変更できます。 後の段階でも。 したがって、PCに保存できるソースとして、機関車の音、音楽、音声などを使用して、独自のサウンドを作成できます。できることには制限がありません。
たとえば、蒸気機関車からディーゼル機関車または電気機関車に、またはその逆に音を変更することは簡単に可能です。
•新しいESUサウンドのテスト: virtual cab(第6章を参照)を使用して、プログラミングトラックでデコーダーをテストできます。
制限事項:一部のデコーダーでは、完全なサウンドプロジェクトのインストールのみが許可され、個々のサウンドは作成できません。 個々のファイルを変更するには、V4プロジェクトを保護しないでください。 サウンドファイルを変更するには、サウンドプロジェクトがLSP(LokSound Programmer Software)で利用可能で開いている必要があります。 デコーダーの音は、デコーダーからソフトウェアに読み込むことができません。 (第10章以降を参照してください。)
•ESU LokSoundモジュールに保存されているサウンドファイルの変更:LokSoundモジュール上のすべてのサウンドファイルをいつでも変更できます。 後の段階でも。 したがって、PCに保存できるソースとして、機関車の音、音楽、音声などを使用して、独自のサウンドを作成できます。できることには制限がありません。
たとえば、蒸気機関車からディーゼル機関車または電気機関車に、またはその逆に音を変更することは簡単に可能です。
•新しいESUサウンドのテスト: virtual cab(第6章を参照)を使用して、プログラミングトラックでデコーダーをテストできます。
制限事項:一部のデコーダーでは、完全なサウンドプロジェクトのインストールのみが許可され、個々のサウンドは作成できません。 個々のファイルを変更するには、V4プロジェクトを保護しないでください。 サウンドファイルを変更するには、サウンドプロジェクトがLSP(LokSound Programmer Software)で利用可能で開いている必要があります。 デコーダーの音は、デコーダーからソフトウェアに読み込むことができません。 (第10章以降を参照してください。)
4. 2.アシスタント
ソフトウェアが起動するとすぐに、アシスタントウィンドウがモニターに表示されます。 これにより、プログラムの最も重要な機能を呼び出すことができます。 選択した機能に応じて、適切なウィンドウがすぐに表示されます。 アシスタントの助けを借りて、重要なタスクを簡単かつ迅速に処理できます。
アシスタントは、次のタスクを実行するのに役立ちます。
•快適な評価と変更のためにデコーダデータを読み出す。
•スチームサウンドデコーダーをディーゼル機関車用に簡単に変更するために、デコーダーのサウンドファイルを完全に変更すること。
•完全に新しいプロジェクトを生成するには
•すでに保存されているプロジェクトを開くため。
これを行うには、目的のオプションを選択し、小さなウィンドウの指示に従います。
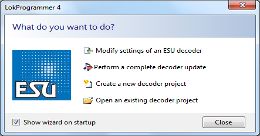
図9. Assistant
P.9
アシスタントは、次のタスクを実行するのに役立ちます。
•快適な評価と変更のためにデコーダデータを読み出す。
•スチームサウンドデコーダーをディーゼル機関車用に簡単に変更するために、デコーダーのサウンドファイルを完全に変更すること。
•完全に新しいプロジェクトを生成するには
•すでに保存されているプロジェクトを開くため。
これを行うには、目的のオプションを選択し、小さなウィンドウの指示に従います。
図9. Assistant
P.9
5.メイン画面
5.1。 ペインを表示
さまざまなタスクに応じて、プログラムはさまざまなビューペインとメニューに分割されます。 図10は、LokProgrammerソフトウェアとその主要コンポーネントのメイン画面を示しています。
•Drivers Cab:ここでは、簡単にデコーダーをテストできます。
•Read/Write CV’s:デコーダーがDCC(NMRA)をサポートしている場合、CVを個別に調整します。
•Decoder:グラフィック表示を備えたESUデコーダーの快適なプログラミング用。
•Information:機能などの情報を表示したり、タイプ、国などのファイルに関する一般情報を表示したりします。
•Sound:サウンドを変更したり、LokSoundデコーダーの新しいサウンド構成を生成したりします。
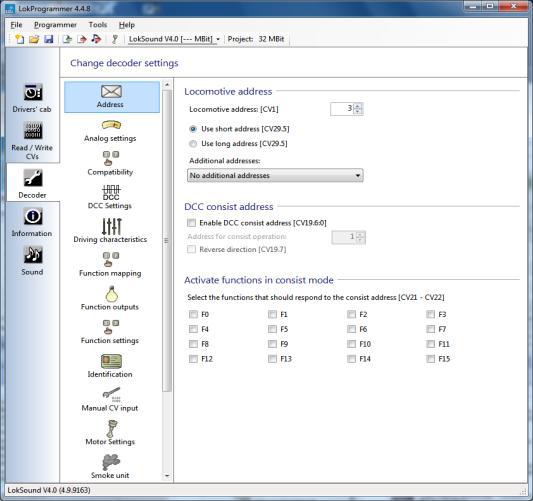
図10 .:メイン画面
•Drivers Cab:ここでは、簡単にデコーダーをテストできます。
•Read/Write CV’s:デコーダーがDCC(NMRA)をサポートしている場合、CVを個別に調整します。
•Decoder:グラフィック表示を備えたESUデコーダーの快適なプログラミング用。
•Information:機能などの情報を表示したり、タイプ、国などのファイルに関する一般情報を表示したりします。
•Sound:サウンドを変更したり、LokSoundデコーダーの新しいサウンド構成を生成したりします。
図10 .:メイン画面
5.2。 タスクバー
図11。 タスクバー
•File:このメニューでは、プロジェクトで以下を実行できます。
New Project(新しいプロジェクト)、Open(開く)、Import Project (プロジェクトのインポート)(v3.5プロジェクトをv4.0プロジェクトに変換します(変換するプロジェクトは、最初にバージョン2.7.9またはバージョン4.7。+ソフトウェアにv3.5ファイルとして保存する必要があります)
インターネット更新機能(2.5を参照)を呼び出して、LokProgrammerソフトウェアを閉じることもできます。
ファイルの保存中に、すべてのデータ、設定、およびサウンドファイルがプロジェクトファイルに書き込まれます。 プロジェクトファイルは、v3.5デコーダーの場合は末尾が「.esu」、v4.0の場合は.esuxで保存されます。
•Programmer:ここでは、デコーダデータの読み取りと書き込み、およびサウンドファイルの書き込みができます。 デコーダのタイプやファームウェアのバージョン番号などの拡張デコーダデータもここで読むことができます。
図.12:メニュー「プログラマー」
「Read Decoder Data」:デコーダーのデータを変更する前に、すべてのデコーダーデータを読み取ることをお勧めします。 機関車をプログラミングトラックに置き、プログラミングトラックが正しく接続されていることを確認します。
次に、画面上部のタスクバーで[デコーダデータの読み取り]をクリックします。 プログラムはすぐにデータの読み取りを開始します。 この処理には1〜2分かかることがあります。しばらくお待ちください。 ステータスは進行状況バーに表示されます。
「Write Decoder Data」:プロジェクトファイルに含まれるCVは、LokProgrammerに接続されたデコーダに書き込まれます。 CVを書き込むために最初に開くウィンドウで[続行]をクリックします。 デコーダー上のすべてのデータが新しいデータに置き換えられます。
「Write Sound Data」:サウンドプロジェクト全体がこのコマンドを使用してデコーダーに書き込まれ、すべてのサウンドデータが置き換えられます。 部分的なサウンド情報を書き込むことはできません。したがって、このコマンドを使用するには、ファイルメニューを使用して、デコーダーのプロジェクトファイルを最初に開く必要があります。 このコマンドを発行すると、すぐにサブメニューダイアログが開きます:(次の列)
図13:サウンドデータの書き込み「プログラマー」
「Write decoder data」(デコーダデータの書き込み)をオンにすると、プロジェクト内のデコーダデータが最初に書き込まれ、続いて音声が書き込まれます。 「Overwrite defaults with current values」(現在の値でデフォルトを上書きする)がチェックされている場合、現在のデコーダデータは、コマンド「reset decoder ,,,」が発行されたときのデフォルトになります。 [次へ]をクリックすると、情報の書き込みが開始され、書き込み中のサウンドデータの量に応じて、完了まで最大30分かかります。
「Reset Decoder」:「Overwrite defaults」が以前に使用されていた場合、デコーダを工場出荷時のデフォルトまたは現在のデフォルトにリセットします。
5.3。 ツール
図14:メニュー「ツール」
[ツール]メニューには、現在のデコーダーに関する情報を提供するオプションがあり、作業中の現在のデコーダーに関して特定のアクションを実行できます(次のページを参照)

最新コメント