「Supported decoders,,」:これは、現在使用しているプログラミングソフトウェアバージョンで現在サポートされているすべてのデコーダーのリストを提供します。
「Export CV List,,」:.txtファイルを作成し、ファイル保存ダイアログを開きます。比較など、将来の使用のために現在のCVのリストを保存できます。
「Show changed CV’s,,」:プロジェクトファイルが最後に開かれてから変更されたCVのみのリストを表示するサブダイアログボックスを開きます。 これは、デコーダーの手動プログラミングなどのアクションを実行する場合に非常に便利です。 以下の図15を参照してください。
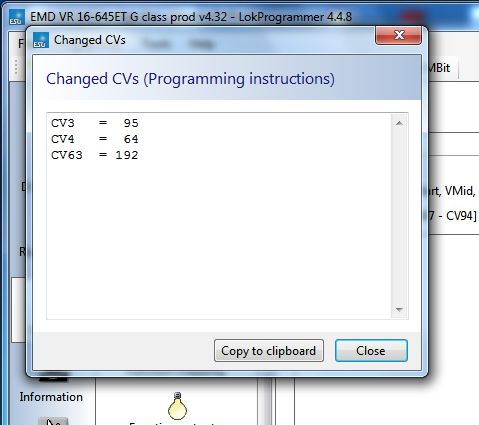
図15:CVの変更、サブダイアログ「ツール」
「Load Control,,」:各モータータイプに基づいてソフトウェアに組み込まれたパフォーマンステンプレートを持つ一般的なDCCモーターをリストするサブダイアログボックスを開きます。 このリストから、モデルで使用しているモーターと一致する、または厳密に一致するものを選択し、モデルをセットアップするための開始点を提供します。 次の列の上部にある図16を参照してください。
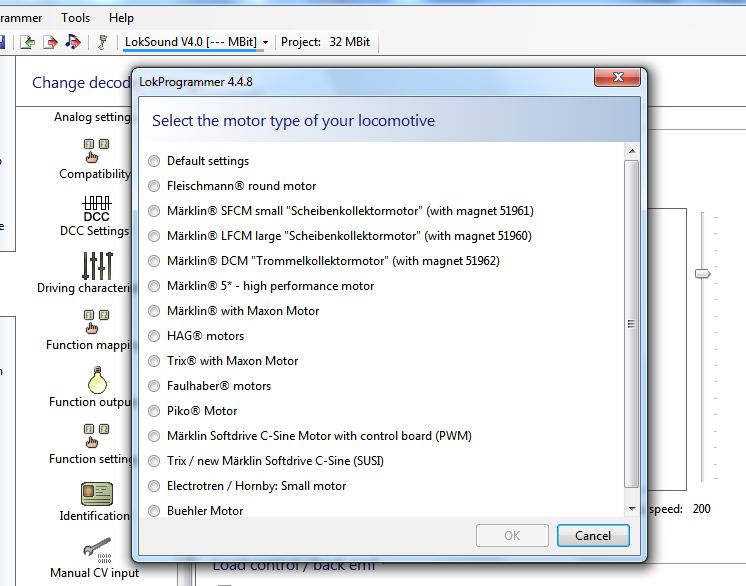
図16:負荷制御、サブダイアログ「ツール」
「Update decoder firmware(デコーダファームウェアの更新)」:現在のデコーダが現在のファームウェアにあることを確認するか、現在のファームウェアをデコーダに書き込むアクティビティをコマンドします。 このアクションは、デコーダデータを書き込むコマンドにも組み込まれていることに注意してください。
「Change decoder type(デコーダータイプの変更)」:これにより、LokSound MicroやStandardのようなプロジェクトを開き、デコーダータイプをXLなどのサポートされている別のデコーダーに変更できます。 注意; デコーダタイプをv4プロジェクトからv3.5に変更することはできません。このオプションは、同じデコーダアーキテクチャ内で動作するために予約されています。
「Program Settings(プログラム設定)」:現在のプログラマー設定を設定または変更できるサブダイアログを開きます。 ファイルディレクトリ、言語、ディスプレイCVなど。これは、LokPprogrammerハードウェアとの通信のためにcom設定が制御される場所でもあります。 次の列の図17および18を参照してください。
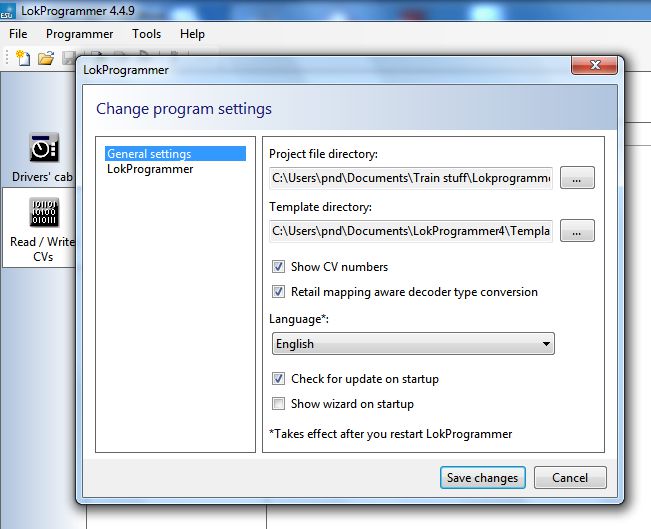
図17:プログラム設定、サブダイアログ「一般」
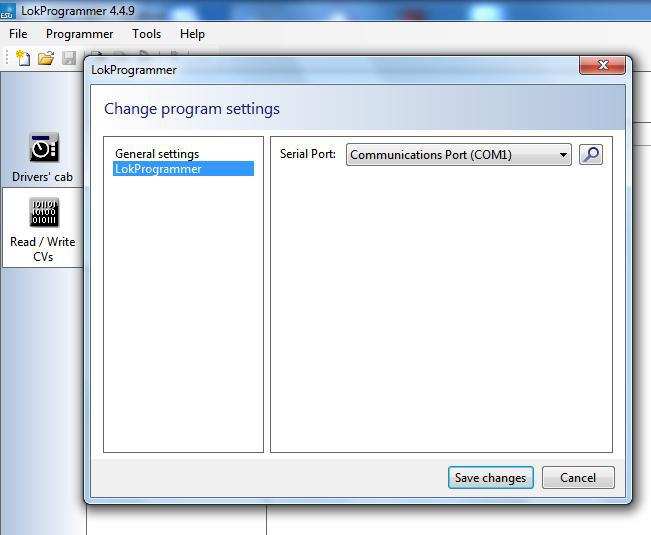
図18:プログラム設定、サブダイアログ「LokProgrammer」
P.11
6.運転席 
運転台の助けを借りて、デコーダーとサウンドプロジェクトをテストできます。 機関車を実行して、すべての機能をトリガーできます。 したがって、LokProgrammerを使用して、プログラミングトラックで機関車をテスト実行できます。

図19:Virtual Driver’s Cab
Drivers Cabセクションには、Switch PilotデコーダーのテストもできるTurnout Control Panelが含まれています。
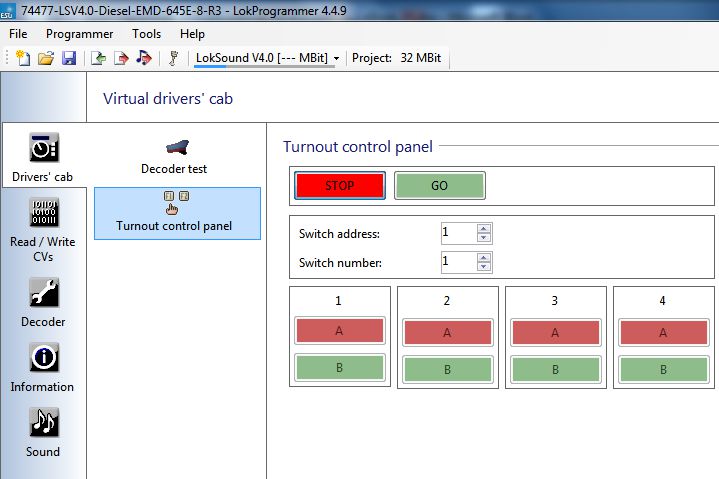
図20: Turnout Control Panel
ただし、いくつかの制限があります。LokProgrammerの電源は、許容電流を約400 mAに制限します。 機関車のモーターに高い電流が流れると、過電流保護が作動し、プログラミングトラックへの電力が遮断されます。 これは、LokProgrammerの黄色のLEDの点滅によって示されます。 この場合、virtual cabを非アクティブにしてから再度オンにします。 このレジスタの他のすべての機能は自明です。アドレスと速度ステップ数を入力できます。 速度ステップがLokProgrammerで設定されたものと一致することを確認してください。
LokProgrammerは、バージョン2.5以降のMotorola®形式のように、DCC形式の機関車を実行できます。 ハードウェアが原因で、LokProgrammerはM4を処理できません。 Motorola®形式でM4プロジェクトをテストします。
virtual cabをオンにする前に、プログラミングトラックがレイアウトのメインラインから完全に分離されていることを確認してください。
電気的なブリッジがあると、LokProgrammerを損傷する可能性があります(2.2も参照)。
「キャブを作動」フィールドをクリックして、テスト走行用の機関車を作動させます。
スライドスロットルで機関車の速度を制御します。適切なフィールドをクリックすると、機能のオンとオフが切り替わります。機能F12までは、コンピューターのキーボードの数字を押すこともできます。
LokProgrammerで機関車を実行することは、コマンドステーションに代わることができないし、すべきではないことに注意してください。パワーパックの電力が限られているため、一度に複数の機関車を実行することはできません。 virtual cabを使用すると、機関車をすばやくテスト走行することができます。
図19:Virtual Driver’s Cab
Drivers Cabセクションには、Switch PilotデコーダーのテストもできるTurnout Control Panelが含まれています。
図20: Turnout Control Panel
ただし、いくつかの制限があります。LokProgrammerの電源は、許容電流を約400 mAに制限します。 機関車のモーターに高い電流が流れると、過電流保護が作動し、プログラミングトラックへの電力が遮断されます。 これは、LokProgrammerの黄色のLEDの点滅によって示されます。 この場合、virtual cabを非アクティブにしてから再度オンにします。 このレジスタの他のすべての機能は自明です。アドレスと速度ステップ数を入力できます。 速度ステップがLokProgrammerで設定されたものと一致することを確認してください。
LokProgrammerは、バージョン2.5以降のMotorola®形式のように、DCC形式の機関車を実行できます。 ハードウェアが原因で、LokProgrammerはM4を処理できません。 Motorola®形式でM4プロジェクトをテストします。
virtual cabをオンにする前に、プログラミングトラックがレイアウトのメインラインから完全に分離されていることを確認してください。
電気的なブリッジがあると、LokProgrammerを損傷する可能性があります(2.2も参照)。
「キャブを作動」フィールドをクリックして、テスト走行用の機関車を作動させます。
スライドスロットルで機関車の速度を制御します。適切なフィールドをクリックすると、機能のオンとオフが切り替わります。機能F12までは、コンピューターのキーボードの数字を押すこともできます。
LokProgrammerで機関車を実行することは、コマンドステーションに代わることができないし、すべきではないことに注意してください。パワーパックの電力が限られているため、一度に複数の機関車を実行することはできません。 virtual cabを使用すると、機関車をすばやくテスト走行することができます。
7.デコーダー情報、CVの読み取り/書き込み
「Read / Write CVs(CVの読み取り/書き込み)」レジスタでは、2つのアクションを実行できます。最初のリストは「“Decoder Information(デコーダー情報)」というラベルのアイコンです(図21を参照)。「Read decoder information(デコーダー情報の読み取り)」というタイトルのボタンをクリックすると、現在接続されているデコーダー プログラマーが読み取られ、図21に示すように、デコーダー情報ダイアログに情報が表示されます。
また、このレジスタ内で、プログラマに接続されている現在アクティブなデコーダで個々のCVを読み書きできます(図22を参照)。これは次のように行われます。レジスタ「Read / Write CV」を選択します。 次に、CVを読み取るには:
•上部のデータ入力フィールドに読み取りたいCVの番号を入力します。
•「Read CVs(CVの読み取り)」ボタンを押します。
•結果は2進形式と10進形式で表示されます。

図21.: Decoder Information
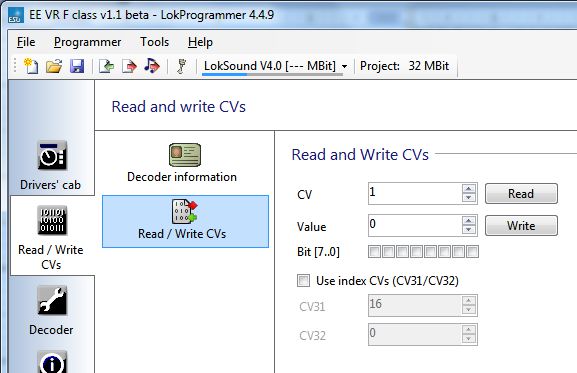
図22: Read / Write CV’s
CVを書く:
•上部のフィールドに書き込みたいCVの番号を入力します。
•下部のデータ入力フィールドにCVの新しい値を書き込みます。
•「Write CVs(CVを書き込む)」ボタンをクリックします。
•CVは新しい値で上書きされます。
•インデックスCVも表示されます。値を正しく書き込むには、正しく設定する必要があります。
注:POM(Program on the Main(メインのプログラム))と同様に、サウンドプロジェクトの値は変更されません。
P.12
また、このレジスタ内で、プログラマに接続されている現在アクティブなデコーダで個々のCVを読み書きできます(図22を参照)。これは次のように行われます。レジスタ「Read / Write CV」を選択します。 次に、CVを読み取るには:
•上部のデータ入力フィールドに読み取りたいCVの番号を入力します。
•「Read CVs(CVの読み取り)」ボタンを押します。
•結果は2進形式と10進形式で表示されます。
図21.: Decoder Information
図22: Read / Write CV’s
CVを書く:
•上部のフィールドに書き込みたいCVの番号を入力します。
•下部のデータ入力フィールドにCVの新しい値を書き込みます。
•「Write CVs(CVを書き込む)」ボタンをクリックします。
•CVは新しい値で上書きされます。
•インデックスCVも表示されます。値を正しく書き込むには、正しく設定する必要があります。
注:POM(Program on the Main(メインのプログラム))と同様に、サウンドプロジェクトの値は変更されません。
P.12
8.「decoder settings(デコーダー設定)」レジスタ
デコーダーのモーター制御とCV構成に関するすべての設定(関数マッピング、サウンド設定、DCC設定など)は、「デコーダー設定の変更」レジスターで処理されます。 プログラムを起動すると、このレジスタは最初は空であることに注意してください。 このフィールドに情報が表示されるのは、新しいプロジェクトを生成するか、既存のプロジェクトを開くか、デコーダーを読み取った後のみです。 プロジェクトは、デコーダーに保存されているすべてのデータのイメージです。
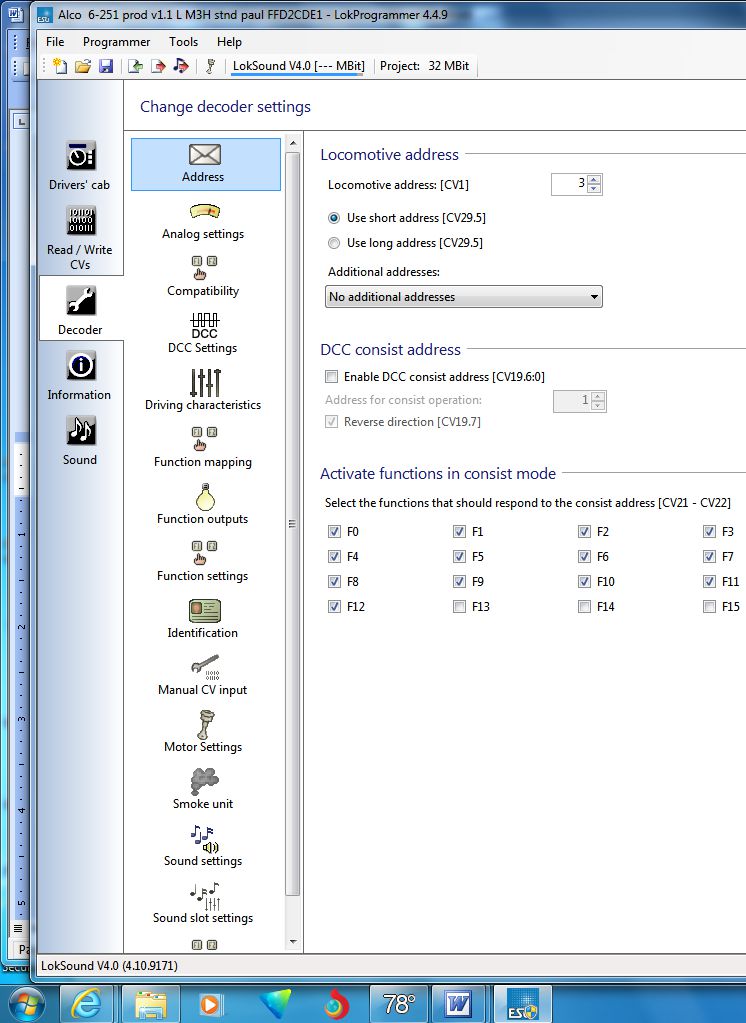
図 23.: The „Change decode settings“ register
さまざまなオプションに移動できるボタンは、画面の左側にあります。 動きと音の振る舞いに加えて、ブレーキモード、アドレスなどの特定の設定を調整できます。次のページでは、パラメーターとオプションについて説明します。
図 23.: The „Change decode settings“ register
さまざまなオプションに移動できるボタンは、画面の左側にあります。 動きと音の振る舞いに加えて、ブレーキモード、アドレスなどの特定の設定を調整できます。次のページでは、パラメーターとオプションについて説明します。
8.1。 デコーダーアドレス
8.1.1。 アドレス(CV 1、CV 17、CV 18)
アドレスの変更はすべて「アドレス」ウィンドウで行われます。 いわゆる短い(2桁、CV1)または長いアドレス(4桁、CV17およびCV18)と呼ばれるデコーダータイプに応じて使用できます。
これらのCVの設定は、NMRA-DCC準拠のコマンドステーションでの操作にのみ有効であることに注意してください。
Märklin®/Motorola®-プロトコルでデコーダーを操作する場合、別のアドレス、つまりMärklin®-アドレスが有効です。
F5からF8をアクティブにするために、Motorola®モードでM4デコーダーの2番目のアドレスを入力できます。 通常、これはデコーダのアドレスに1を足したものになります。
これらのCVの設定は、NMRA-DCC準拠のコマンドステーションでの操作にのみ有効であることに注意してください。
Märklin®/Motorola®-プロトコルでデコーダーを操作する場合、別のアドレス、つまりMärklin®-アドレスが有効です。
F5からF8をアクティブにするために、Motorola®モードでM4デコーダーの2番目のアドレスを入力できます。 通常、これはデコーダのアドレスに1を足したものになります。
8.1.2。 一貫した設定(CV 19)
DCC構成アドレスは、複数のトラクションに役立ちます。 構成モードの機能ボタンだけでなく、構成の機能出力をアクティブにすることもできます。
場合によっては、両方(またはすべて)の機関車(ライトなど)で1つのボタンを押すことで機能が実際にトリガーされるように、特定の機能をコンシッドモードに設定することが望ましい場合があります。
構成モードでアクティブにする必要がある機能の適切なボタンをクリックします。
場合によっては、両方(またはすべて)の機関車(ライトなど)で1つのボタンを押すことで機能が実際にトリガーされるように、特定の機能をコンシッドモードに設定することが望ましい場合があります。
構成モードでアクティブにする必要がある機能の適切なボタンをクリックします。
8.2。 DCC /アナログ
サポートされるアナログモードと設定(CV 13、14、50、125、126、127、128、129、130)。 アナログモードでは、負荷補正はアクティブではありません。 したがって、適切なスライドコントロールを使用することで、ACまたはDCアナログモードの開始電圧と最大速度を個別に調整して、モーターまたはトランスの特性に一致させることができます。 さらに、アナログモードでアクティブにする必要がある機能(DC、AC、またはその両方、CV 50)を選択できます。
8.2.1。 アナログモードのアクティブな機能(CV13、CV14)
ほとんどのアナログレイアウトには機能をトリガーする入力デバイスがないため、これらのパラメーターを使用すると、アナログモードで自動的にアクティブにする機能を事前に選択できます。
サウンド(ヨーロッパのプロジェクトではデフォルト値F1、アメリカではF8)と蒸気機関車の煙発生器(多くの場合F4)をオンにすることをお勧めします。 また、必要に応じて照明をアクティブにする必要があります。 チェックされた機能は、アナログ操作中は制御できません。オン(チェック)またはオフ(チェックなし)のいずれかです。
サウンド(ヨーロッパのプロジェクトではデフォルト値F1、アメリカではF8)と蒸気機関車の煙発生器(多くの場合F4)をオンにすることをお勧めします。 また、必要に応じて照明をアクティブにする必要があります。 チェックされた機能は、アナログ操作中は制御できません。オン(チェック)またはオフ(チェックなし)のいずれかです。
8.2.2。 ACアナログモード(CV 29、CV50)
ACアナログモードをアクティブにし、開始電圧(最低速度)(CV127)および最高速度電圧(CV128)の設定を可能にします。
8.2.3。 DCアナログモード(CV29、CV50)
DCアナログモードをアクティブにし、開始電圧(最低速度)(CV125)および最高速度電圧(CV126)の設定を可能にします。
8.2.4。 アナログ電圧ヒステリシス(CV 130、CV129)
電圧が開始電圧からモータヒステリシス電圧を引いた値を下回ると、モータは停止します。 電圧がモーター開始電圧から機能差を引いた値に達すると、機能がアクティブになります。
8.3。 互換性
ESU v4デコーダーには特定の特性が組み込まれており、特定のdccコマンドステーションとの運用上の互換性を強化するように構成できます。 互換性設定は、プログラミングソフトウェアの特定のボックスをオンにすることで有効になります。 これらの選択ボックスは、互換性セクションで識別されます。 利用可能なオプションは次のとおりです。
8.3.1 LGB MTS(CV49.5)
このボックスをオンにすると、f1からf8までのシリアル機能モードが有効になり、LGBマルチトレインシステムとの互換性が向上します
コマンドステーション
コマンドステーション
8.3.2 Marklin Deltaモード(CV49.2)
このオプションは、Marklin delta dccシステムをサポートするMarklin Deltaモードを有効にします。
8.3.3 Zimo手動機能(CV49.6)
このオプションをチェックすると、Zimoの手動機能を有効にできます。
8.3.4シリアルユーザー標準インターフェイス(CV 124.3)
このオプションを選択すると、デコーダーのシリアルユーザー標準インターフェイス(SUSI)が有効になります。これにより、デコーダーは最大3台のSUSIデバイスと通信できます。
P.13
P.13
8.4。 DCC設定
図24に示すように、このビューウィンドウで構成できるアイテムのグループは2つあります。これらは、RailCom設定と速度ステップモードです。
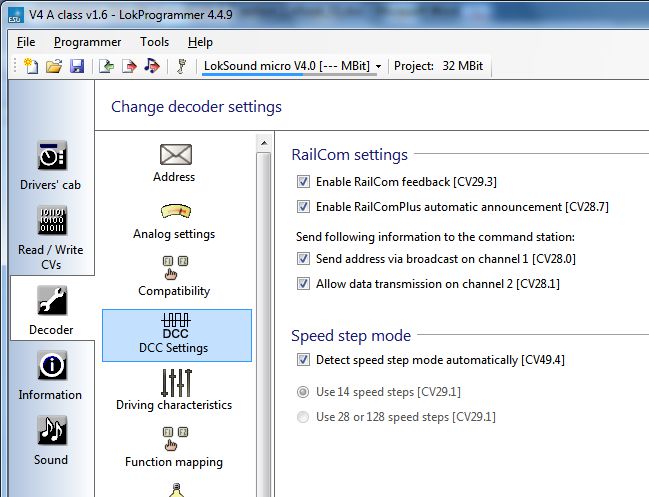
図24.: The „DCC Settings“ register
図24.: The „DCC Settings“ register
8.4.1 RailCom設定CV29、CV28)
これらの設定により、RailCom情報を有効または無効にすることができます。 最初のオプションをチェックすると、RailComのフィードバックが有効になり、必要に応じて他の3つの項目を設定できます。 LokSound v4デコーダーはRailCom対応であるため、RailComが提供する機能を提供します。
8.4.2速度ステップモード(CV49、CV29)
ここで、機関車を実行するための設定を調整できます。 DCCモードでは、速度ステップを手動で14、28、または128に設定するオプションがあります。オプションで、最初のオプションボックスをオンにして、速度ステップが自動的に検出されるようにすることができます。
8.5運転特性
このビューウィンドウ内の項目を使用すると、利用可能な全体的な運転機能に影響するいくつかの変数を調整できます。 加速および減速(運動量)、ブレーキオプション、速度トリミング、およびその他のパワーハンドリング機能。
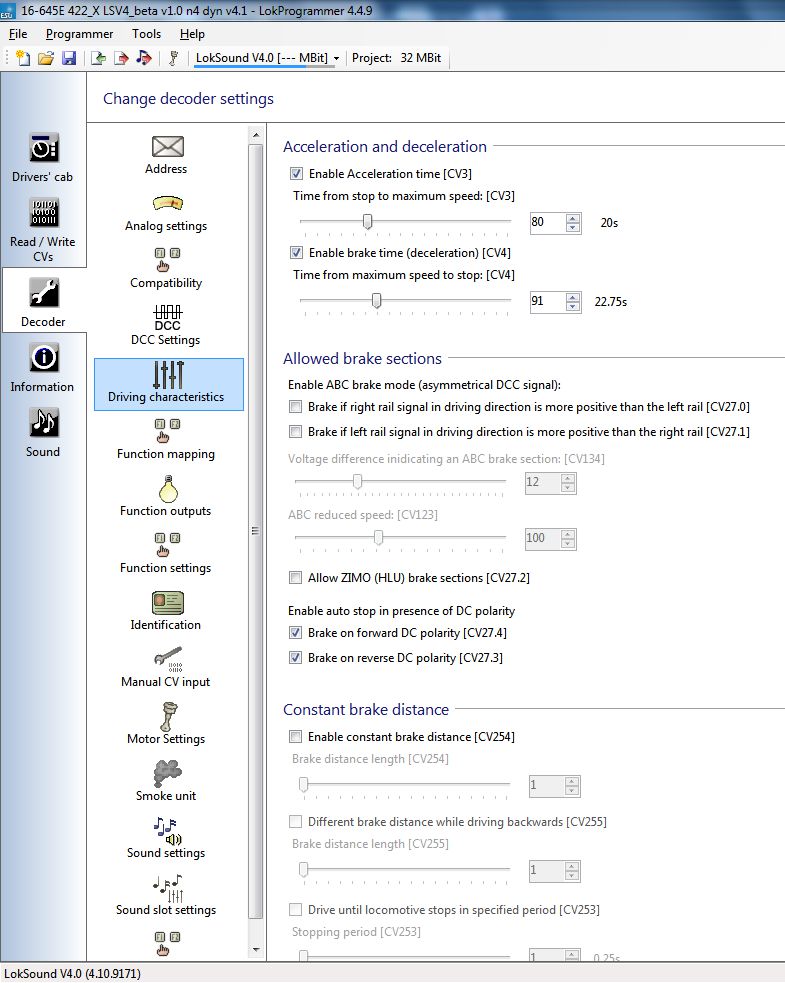
図25.: The „Driving characteristics“ register
図25.: The „Driving characteristics“ register
8.5.1加速と減速(CV3、CV4)
加速と減速のチェックボックスを選択すると、加速と減速のモーメンタム値が有効になり、設定されます。 運動量の値を設定すると、モデルをより現実的な方法で動作させることができ、特定のサウンド機能を楽しむことができます。
加速(CV3)は、1〜255の10進数値範囲内の可変スライダーを使用して調整でき、0.1秒から63.75秒までの加速時間を提供します。
減速時間(CV4)は、惰性走行のための値を設定することができ、同じ範囲にわたって減速時間を使用して調整することができます。 より高い運動量の設定により、coast行音や加速音など、特定のサウンド機能を現実的に操作することもできます。
加速(CV3)は、1〜255の10進数値範囲内の可変スライダーを使用して調整でき、0.1秒から63.75秒までの加速時間を提供します。
減速時間(CV4)は、惰性走行のための値を設定することができ、同じ範囲にわたって減速時間を使用して調整することができます。 より高い運動量の設定により、coast行音や加速音など、特定のサウンド機能を現実的に操作することもできます。
8.5.2許可されたブレーキセクション(CV27、CV134、CV123)
v4デコーダーでは、さまざまな自動ブレーキセクションを有効にできます。 これにより、デコーダーが実行されているレイアウトを、トラックのセクションに到達したときに機関車の制動をトリガーするように構成できます。
おそらく曲線であり、その後、機関車は退出時に以前の速度に戻ります。 レイアウトに一致するボックスをチェックすることにより、さまざまなタイプのブレーキセクションの検出が可能になります。
ABCブレーキモードは、右側のレール(CV27.0)、左側のレール(CV27.1)、または両方が他方よりも正の電圧を持つように設定できます。 トリガーを有効にするための電圧差(CV134)は、4〜32の範囲の可変スライダーで設定でき、レイアウトの設定に大きな柔軟性を提供します。 2番目のスライダー(CV123)では、0〜255の値の範囲で減速の量を設定でき、ごくわずかな停止から完全な停止までの自動減速が可能です。
ZIMO(HLU)ブレーキセクション(CV27.2)との互換性も利用可能です(オプションを選択して有効にします)。
適切なチェックボックスを選択することにより、順方向DC極性(CV27.4)または逆DC極性(CV27.3)のいずれかを伝える自動停止ブレーキセクションを有効にすることもできます。
おそらく曲線であり、その後、機関車は退出時に以前の速度に戻ります。 レイアウトに一致するボックスをチェックすることにより、さまざまなタイプのブレーキセクションの検出が可能になります。
ABCブレーキモードは、右側のレール(CV27.0)、左側のレール(CV27.1)、または両方が他方よりも正の電圧を持つように設定できます。 トリガーを有効にするための電圧差(CV134)は、4〜32の範囲の可変スライダーで設定でき、レイアウトの設定に大きな柔軟性を提供します。 2番目のスライダー(CV123)では、0〜255の値の範囲で減速の量を設定でき、ごくわずかな停止から完全な停止までの自動減速が可能です。
ZIMO(HLU)ブレーキセクション(CV27.2)との互換性も利用可能です(オプションを選択して有効にします)。
適切なチェックボックスを選択することにより、順方向DC極性(CV27.4)または逆DC極性(CV27.3)のいずれかを伝える自動停止ブレーキセクションを有効にすることもできます。
8.5.3一定のブレーキ距離(CV254、CV255、CV253、CV27.7)
一定のブレーキ距離により、レイアウト上で列車が停止する場所を正確に制御できます。 この効果は、ブレーキセクションと連動します。CV254のみを設定してブレーキ距離を決定し、CV27ビット7を設定することにより、ブレーキセクションなしで使用できます。これらの設定により、v4は速度制御時に停止コマンドを生成します 速度ステップ0に設定されます。停止距離はCV254で設定された値に基づきます。 詳細については、v4デコーダーマニュアルの10.6章「一定ブレーキ距離」を参照してください。
P.14
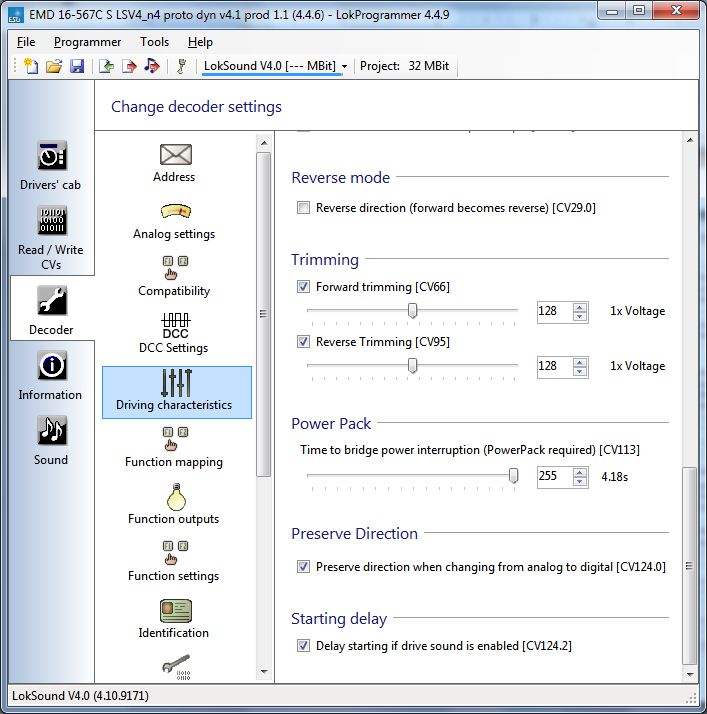
図26.: The „Driving characteristics“ register
P.14
図26.: The „Driving characteristics“ register
8.5.4。 リバースモード(CV 29)
「リバースモード」のチェックマークは、進行方向とヘッドライトの方向特性を変更します。 これは
配線が間違って行われた場合に便利です(トラックの交換
リードまたはモーターリード)。
配線が間違って行われた場合に便利です(トラックの交換
リードまたはモーターリード)。
8.5.6トリミング(CV66、CV95)
トリム機能を使用すると、前進と後退の最大速度を個別に設定できます。 モーター電圧の乗算に使用される係数は、CV値を128で除算した結果です(順方向CV 66および逆方向CV 95)。
8.5.7パワーパック(CV 113)
V4デコーダー(HOおよびN)は、コンデンサーまたはパワーパック(いわゆる「キープアライブ」デバイス)のインストールを提供します。 CV113では、デバイスがアクティブな時間を制御できます。設定範囲は、調整スライダーを使用して0〜255です。推定アクティブ時間は、設定の右側に秒単位で表示されます。コンデンサまたはパワーパックの取り付けに関する情報は、デコーダーマニュアルの10.9(構成)および6.11(配線)の章に記載されています。
8.5.8方向の保持(CV124.0)
このオプションをオンにすると、v4装備のロコがDCC制御からアナログ制御トラックセクションに移行するときに方向を一定に保ちます。
8.5.9開始遅延(CV124.2)
通常、LokSound V4.0の音がアイドリングし、スロットルを上げると、機関車はディーゼルエンジンがノッチ1に達した後にのみ動き始めます。蒸気機関車は最初にブレーキを解放し、シリンダーを満たします。この振る舞いは非常に典型的なものですが、多少の遅延を引き起こすため、気に入らないかもしれません。このオプションをオフにするだけで、この起動遅延を制御できます。これにより、スロットルを上げたときにLokSound V4.0デコーダーがすぐに動き始めます。ただし、起動音はモーションと同期しなくなります。
8.6。 機能ビュー
LokSound V4.0デコーダーとLokSound micro V4.0デコーダーの機能マッピングは同じです。 M4およびXLデコーダーの画面表示は異なります。 特定のプロジェクトのデコーダータイプが変更されると、表示が変わります。 したがって、画面表示はデコーダーのタイプに依存します。 ここに示されているのは、V4標準およびマイクロデコーダーのディスプレイです。 関数マッピングに関する多くの情報がv4デコーダーマニュアルにあります。
もちろん、どのサウンドがどのサウンドスロットに割り当てられるかは、デコーダープロジェクトによって異なります。 www.esu.euのホームページに、利用可能なすべてのプロジェクトファイル「Download / Sound files / LokSoundV4.0 /」のリストがあります。 また、すべての機能と使用されているサウンドスロットのリストを表示および印刷できます。
LokSound V4.0デコーダーは、強力で柔軟な機能マッピングオプションを提供します。 各機能ボタンは、必要な数の出力を切り替えることができます。 各出力は、いくつかの機能ボタンでアクティブにできます。 機能ボタンをリンクできます(例:F3とF5を同時に押す)
機能ボタンは反転できます(例:F8がオンのときは無効)。
ボタンF0からF28の他に、移動方向または速度(機関車が動いている/停止している)を組み込むこともできます。
最大5つの外部センサーを接続できます。 多くの鉄道模型愛好家は、すべての機関車を最適に動作させるためにこれらの機能を正確に必要としていますが、機能マッピングのセットアップは、いわゆる「フリースタイル」バージョンのデコーダプログラミングを表しています。 設定の変更を開始する前に、時間をかけてその背後にある概念を理解してください。 すべての関数マッピングCVの完全なレビューについては、v4デコーダーのマニュアルを参照してください。
ヒント:LokProgrammerハードウェアがない場合でも、「変更されたCVの表示」機能と組み合わせてマッピング変更を行う際の補助としてソフトウェアを使用できます。
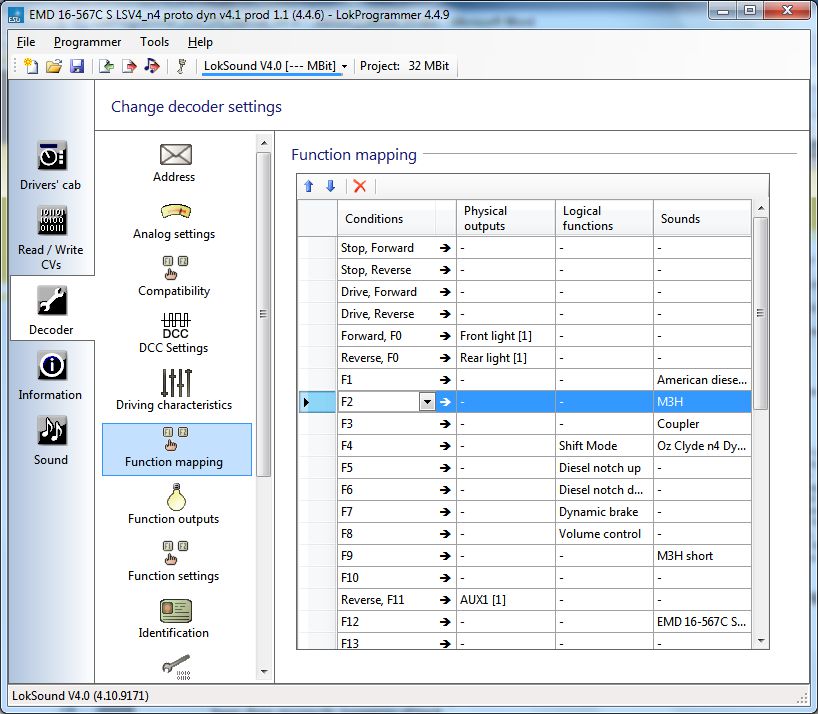
図27.: The „Function mapping“ register
関数マッピングビューは、条件、物理的出力、論理関数、およびサウンド用の垂直列を持つマトリックスとして配置されます。 水平の行には、必要に応じてマッピングで使用するための各条件と機能キーがリストされます。 図27を参照してください。
もちろん、どのサウンドがどのサウンドスロットに割り当てられるかは、デコーダープロジェクトによって異なります。 www.esu.euのホームページに、利用可能なすべてのプロジェクトファイル「Download / Sound files / LokSoundV4.0 /」のリストがあります。 また、すべての機能と使用されているサウンドスロットのリストを表示および印刷できます。
LokSound V4.0デコーダーは、強力で柔軟な機能マッピングオプションを提供します。 各機能ボタンは、必要な数の出力を切り替えることができます。 各出力は、いくつかの機能ボタンでアクティブにできます。 機能ボタンをリンクできます(例:F3とF5を同時に押す)
機能ボタンは反転できます(例:F8がオンのときは無効)。
ボタンF0からF28の他に、移動方向または速度(機関車が動いている/停止している)を組み込むこともできます。
最大5つの外部センサーを接続できます。 多くの鉄道模型愛好家は、すべての機関車を最適に動作させるためにこれらの機能を正確に必要としていますが、機能マッピングのセットアップは、いわゆる「フリースタイル」バージョンのデコーダプログラミングを表しています。 設定の変更を開始する前に、時間をかけてその背後にある概念を理解してください。 すべての関数マッピングCVの完全なレビューについては、v4デコーダーのマニュアルを参照してください。
ヒント:LokProgrammerハードウェアがない場合でも、「変更されたCVの表示」機能と組み合わせてマッピング変更を行う際の補助としてソフトウェアを使用できます。
図27.: The „Function mapping“ register
関数マッピングビューは、条件、物理的出力、論理関数、およびサウンド用の垂直列を持つマトリックスとして配置されます。 水平の行には、必要に応じてマッピングで使用するための各条件と機能キーがリストされます。 図27を参照してください。
8.6.1関数マッピング、「条件」
入力ブロック(条件ブロック)は、特定の出力を達成するために必要な条件を示します。 条件は、たとえば「F3オン」または「機関車が静止しており、方向が前方に設定され、F8がオンになっている」です。 希望どおりに動作するように出力を構成するには、機能がオンまたはオフのときに目的のアクションを実行する出力を有効にするように構成する機能またはファンクションキーを決定することから始めます。