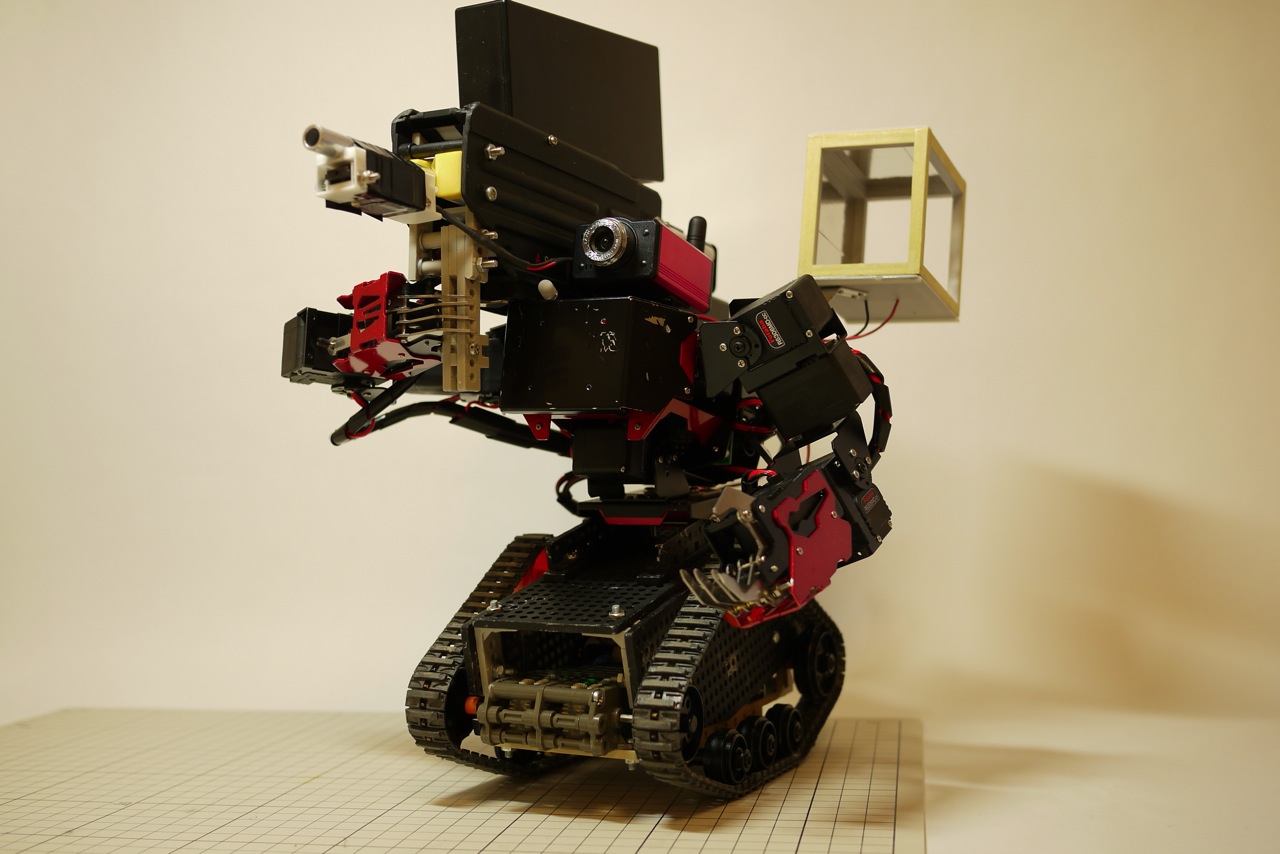
| 名称 | RX-7.5 XeroTANK (ゼロタンク) |
| 制作者 | 二名川 |
| 主武装 | ミニ電動ガン UZI |
| 動力 | ROBOXERO+タミヤ工作パーツ |
| 大きさ | 全高:被弾センサまで270mm・弾倉まで340mm |
| 重量 | 1700g |
| バッテリ | 単3エネループ×8本(本体)、単4エネループ4本(電動ガン) |
| 稼働時間 | 約5分 |
| CPU | HSWB-04F+Arduino |
| 無線方式 | 2.4GHz VS-C1+ REV-1 |
| カメラ | 2.4GHz USB無線カメラ(コントローラーと干渉のためアナログカメラに換装予定) |
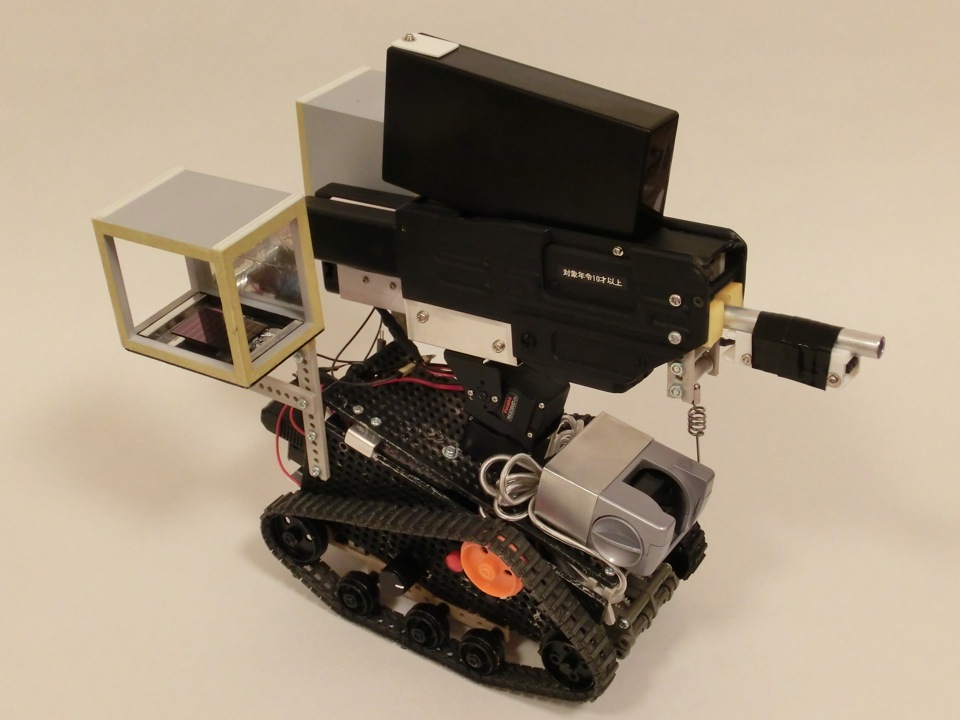
12回大会(2012.08.26)に初参加。
ネット情報を見よう見まねで導入しているロボ初心者の作です。
ROBO-XEROの上半身に、タミヤ工作シリーズで無限軌道を加えました。
ROBO-XERO本体には手を加えていないため、二足歩行バージョンに組み替え可能です。
下半身の制御はArduinoで行っています。ROBO-XEROのコントローラーユニットHSWB-04Fからサーボ用に出ているシリアル信号をArduinoが受け取り、モータードライバー経由で移動用モーターを駆動させています。
また、ガンも同様に、ROBO-XERO→Arduino→ガン(リレースイッチ)と駆動させています。
ガンを握った右腕と腰を動かすことで、上下左右の射撃角度を微調整できます。
やや前のめり気味かも。模型塾の床が排水用に緩やかなスロープになっていたこともあり、対応しきれず倒れることが多かったです。
被弾センサーはロボゼロの背中にビスで固定しています。左肩に被弾センサー用のボリューム。規格の被弾センサーではなく、Arduinoのプログラムで対応しました。
頭部のUSB無線カメラとランドセルのVS-C1受信部が両方2.4GHzと問題あり。試技(コンバットシューティング)で電波干渉が判明。コントロールがほとんど効かなくなりました。
現地でアナログ波のカメラをお借りしての参戦となりました。
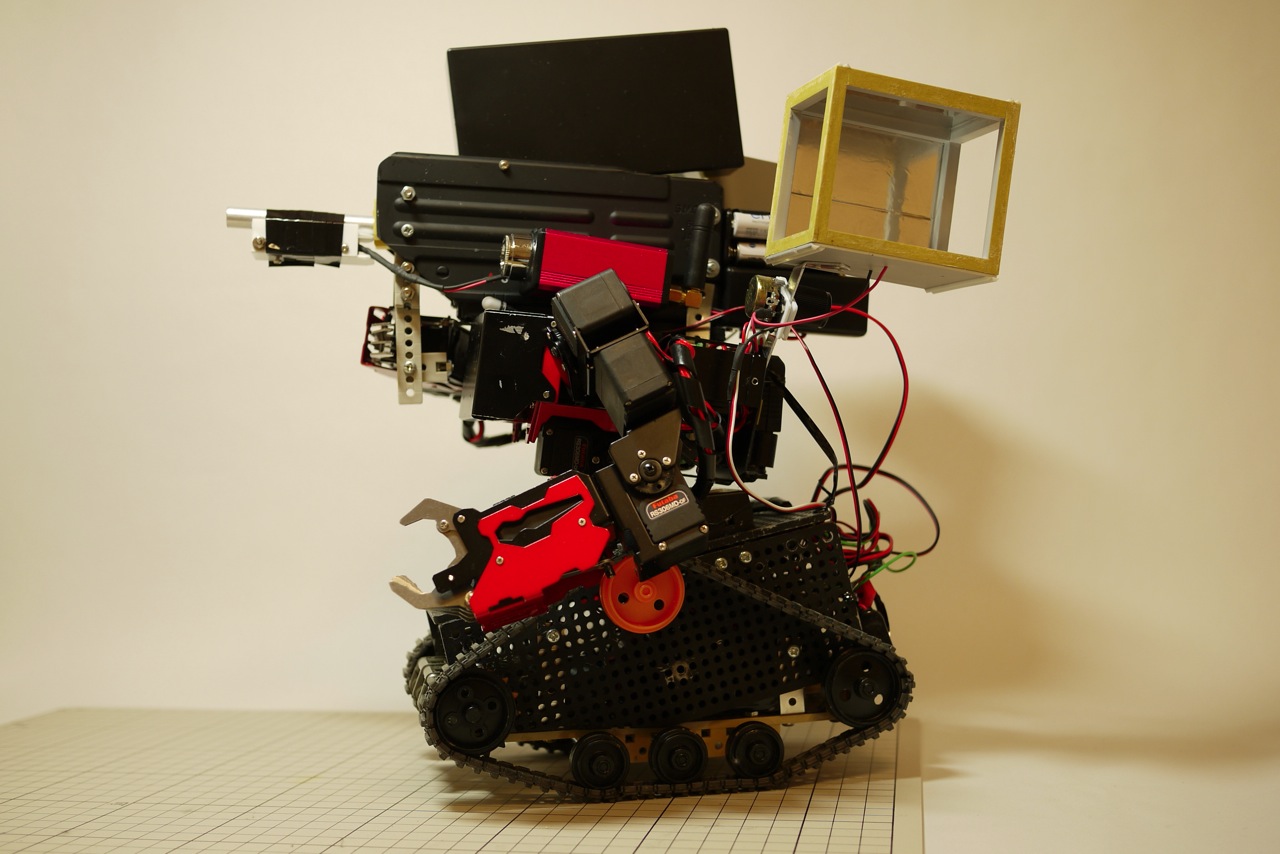
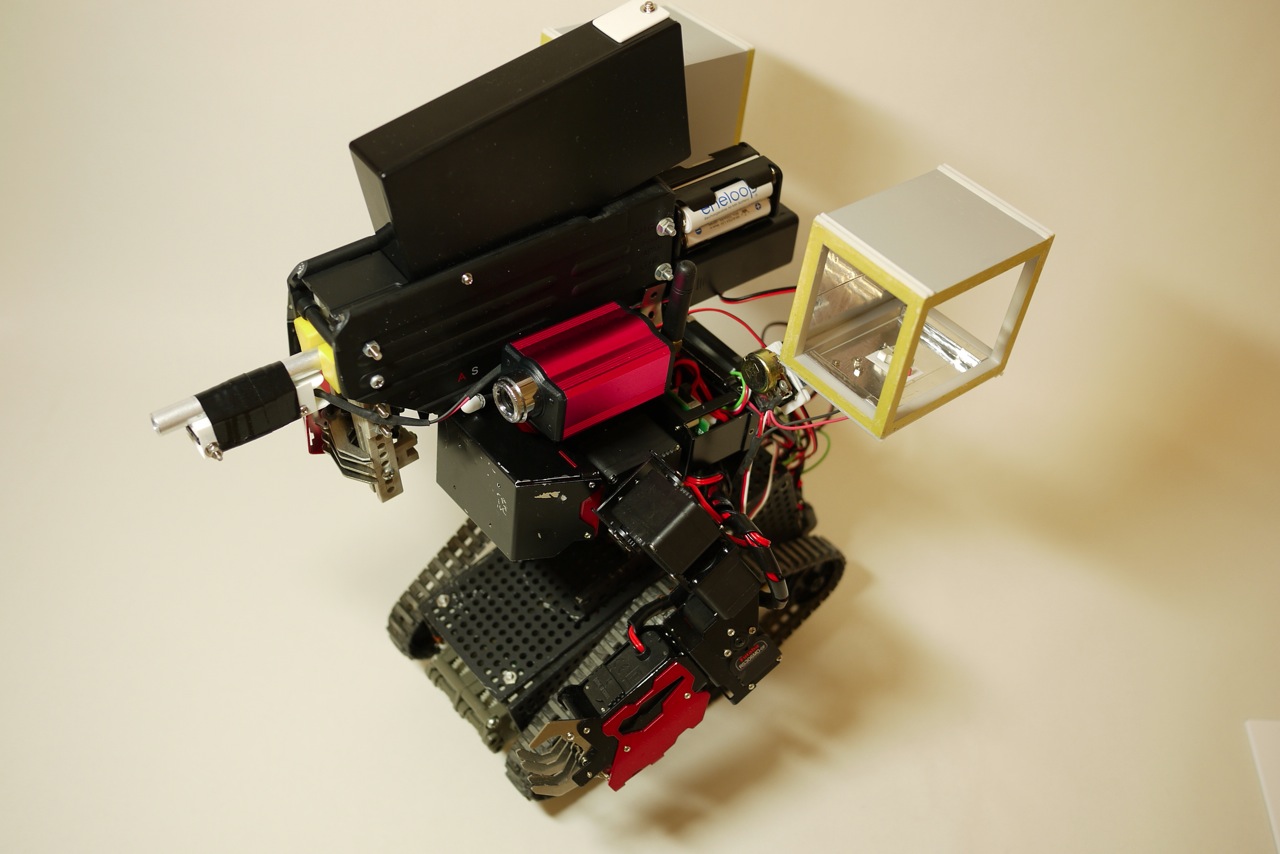
| 名称 | RMV-0.1 XEROTANK II(ゼロタンクII) |
| 制作者 | 二名川 |
| 主武装 | ミニ電動ガン UZI |
| 動力 | タミヤ工作パーツ |
| 大きさ | 全高:被弾センサまで220mm・弾倉まで275mm |
| 重量 | 1200g |
| バッテリ | 単3エネループ×8本(本体)、単4エネループ4本(電動ガン) |
| 9V電池×2(カメラ用・Arduino用)、3Vボタン電池(レーザポインタ用) | |
| 稼働時間 | 約20分 |
| CPU | Arduinoのみ |
| 無線方式 | 2.4GHz VS-C1 |
| カメラ | UHF アナログカメラ(車載用絶版品マルハマMCD-27T) |
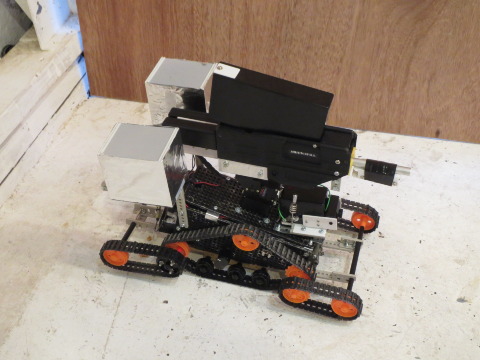
12回大会終了後、ロボットとして中途半端だったゼロタンクを純粋なロボサバ戦車として再設計した機体です。
サーボドロイドとしての機能を砲塔制御のみに限定し、ロボサバ機としての基本・再現性を優先して開発しました。
上半身のサーボドロイド機能をすべてオミットし、従来HSWB-04F(姫路ソフトワークス製CPUボード)経由で行っていた無線制御もArduino単体で行えるよう改良。
結果として、無線リモコン制御・クローラー制御・砲塔サーボ制御・ガン制御のすべてを、
入手性・廉価性・取り扱いに優れたCPUであるArduino1枚に集約することができました。
ただし、カメラ部分はUHFアナログカメラ・被弾センサは公式設計のボードを用いています。
将来的には被弾センサもArduinoに内蔵する計画です。
電源スイッチは、カメラ・本体(CPU&動力用)・ガン主電源・レーザーサイト用と、4か所。
これまでのコネクタ抜き差し式に比べ、バッテリー交換・省エネ性(電源をこまめにオンオフできる)が若干向上しています。
初代機の名残として、依然縦長の機体となっており、登坂力・走破性に大きな課題を残しました。
また、公式被弾センサが「高感度ノイズセンサ」として機能してしまい、自機の発するノイズで撃沈判定を出してしまうという致命的な欠陥がありました。
14回大会(2012.10.28)に出場。
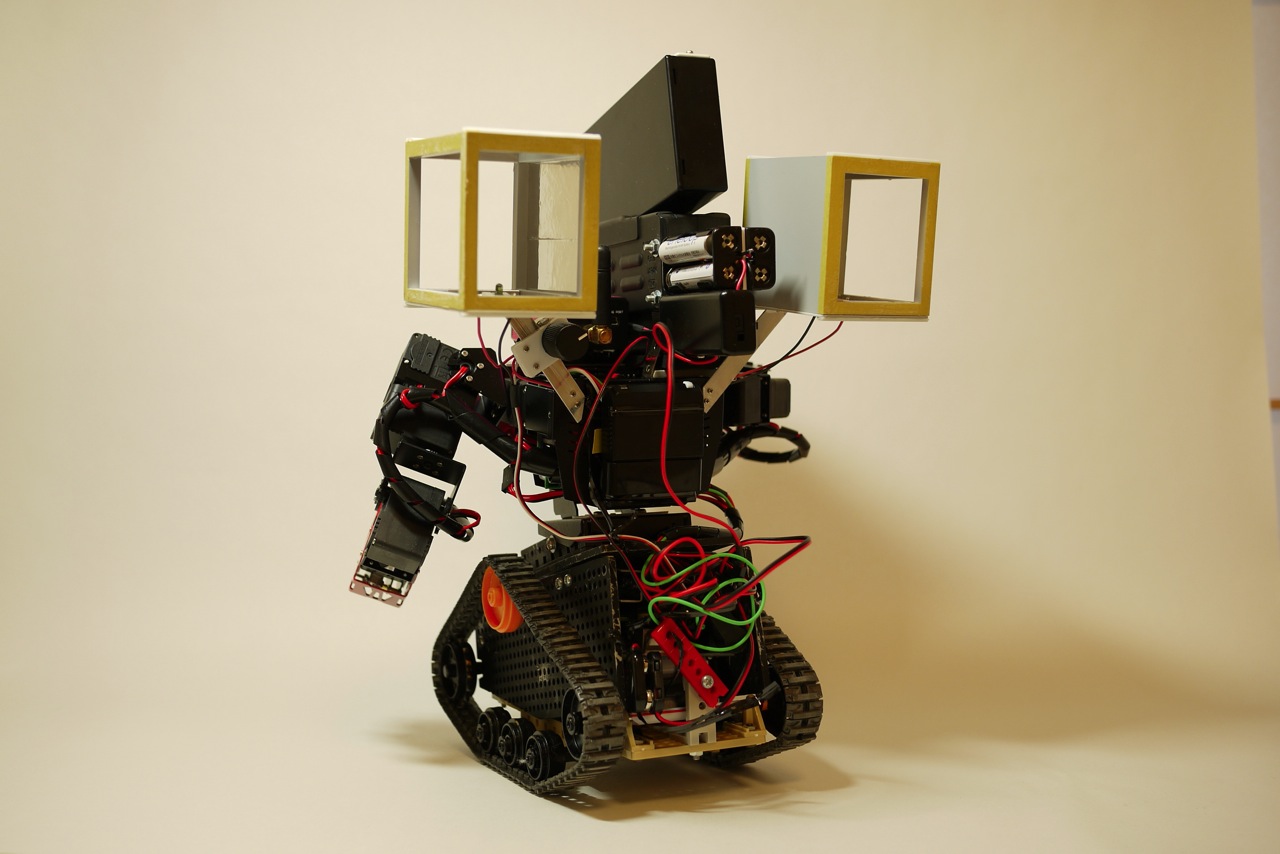
| 名称 | RMV-0.1T XEROTANK II T(ゼロタンクII T) |
| 制作者 | 二名川 |
| 重量 | 1400g |
| 被弾回路 | Arduinoに内包 |
| その他 | RMV-0.1 XEROTANK II に同じ |
障害物のスロープを登る時に転倒するという問題が14回大会で発覚したため、前後に補助クローラーを追加。
登坂力を大幅にアップしました。(TはトハンのTです。)
前後の補助クローラーは平面では接地せず、軽快な旋回力をキープしています。
また、被弾センサーをArduinoに搭載したことで、カメラ以外のすべての処理をArduino1枚で行えるようになりました。
被弾センサもなんとか正常に動作。
Arduinoタイプのクローラーとして、ついに完動品となりました。
15回大会(2012.12.16)に出場。

| 名称 | RX-7.5F Fami-tank PROTO TYPE(ファミタンク仮設1号) |
| 制作者 | 二名川 |
| 重量 | 1500g |
| 被弾回路 | Arduinoに内包 |
RX計画(ROBO-XEROを改造していろんなバリエーションを作る計画)の派生機。
1985年ごろに発売されたゲーム機自身をロボット化する周辺機器という設定です。
(設定の概要はコンソロイドガイドブックに掲載。)
ガンと被弾センサからなる武装ユニットをカートリッジ化し、電源、リセットをゲーム機本体のスイッチから行えるところまでできています。
ただし、試作機の今回はゲームとしては起動しません。将来的には無改造の本体に装着して遊べるようにする予定です。
使用した基本的な技術は、XEROTANK II Tと同等です。
18回大会(2013.09.29)に出場。