回路設計:コイズミ(AZM LAB)
回路図と材料 
(↓クリックで拡大表示されます。)

回路の基本的な動作
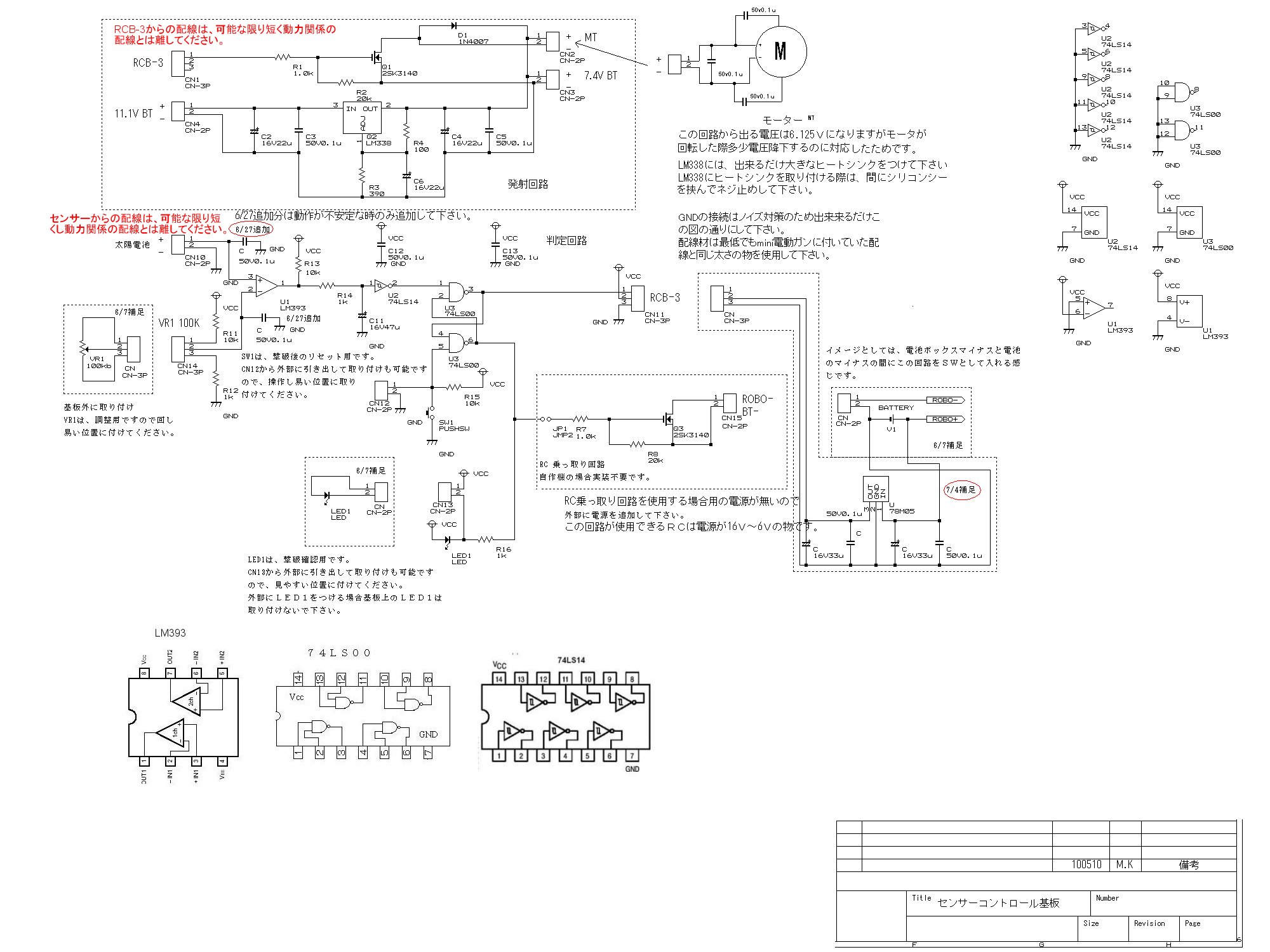
発射回路(回路図の上半分)
RCB−3のH/L出力を利用して、電動ガン等のONN/OFFをコントロールできます。
使用方法:
RCB−3の出力をH/Lに設定して、通常時L、発射時Hにして下さい。
この回路では、約2A強の回路までRCB−3のH/L出力でコントロールが可能ですので、他の外付け機器もコントロール可能です。
*この回路では使用サーボによって、11V系のバッテリーでも、7.4V系のバッテリーでも排他選択で使用できます。
使用方法:
RCB−3の出力をH/Lに設定して、通常時L、発射時Hにして下さい。
この回路では、約2A強の回路までRCB−3のH/L出力でコントロールが可能ですので、他の外付け機器もコントロール可能です。
*この回路では使用サーボによって、11V系のバッテリーでも、7.4V系のバッテリーでも排他選択で使用できます。
7.4V系のバッテリーを使用する場合
C2〜C6、R3、R4、R2,Q2は不要です。
CN3に7.4Vのバッテリーを繋いでください。
CN3に7.4Vのバッテリーを繋いでください。
11V系のバッテリーを使用する場合
RCB−3からの電源を利用せず必ず、バッテリーからの配線を分割して、CN4へ11Vのバッテリーを繋いでください。
RCB−3からの電源を利用すると、電動ガンからのノイズ等がCPUに回る可能性が非常に高くなり、誤動作の元になります。
各コネクターへの接続は、回路図で確認してください。
RCB−3からの電源を利用すると、電動ガンからのノイズ等がCPUに回る可能性が非常に高くなり、誤動作の元になります。
各コネクターへの接続は、回路図で確認してください。
センサー回路(回路図の下半分)
RCB−3等のAD入力に、センサーの被弾判定を出力できます。
使用方法:
RCB−3のAD入力に接続して、ADに3.5v以上が掛かったら、被弾モーションに行くようにして下さい。
被弾モーションに入ったら、ADが0vに成るまで(センサー基板のリセットSWが押されるまで)ずっとそのままの状態になるので、
機体に負担が掛からないよう足は脱力しておいた方が良いと思われます。
*以前ロボコンマガジンに載せた回路に+αし、東京マルイのラジコン戦車を電池ボックスの改造するだけで、
「ロボでサバゲー」の被弾システムに対応できるようになっています。
(回路図の中、点線で囲った部分です。この部分は東京マルイのラジコン戦車等を使用しない方は不要ですので、
部品をはんだ付けしないで結構です。)
使用方法:
RCB−3のAD入力に接続して、ADに3.5v以上が掛かったら、被弾モーションに行くようにして下さい。
被弾モーションに入ったら、ADが0vに成るまで(センサー基板のリセットSWが押されるまで)ずっとそのままの状態になるので、
機体に負担が掛からないよう足は脱力しておいた方が良いと思われます。
*以前ロボコンマガジンに載せた回路に+αし、東京マルイのラジコン戦車を電池ボックスの改造するだけで、
「ロボでサバゲー」の被弾システムに対応できるようになっています。
(回路図の中、点線で囲った部分です。この部分は東京マルイのラジコン戦車等を使用しない方は不要ですので、
部品をはんだ付けしないで結構です。)
被弾センサー&発射回路基板
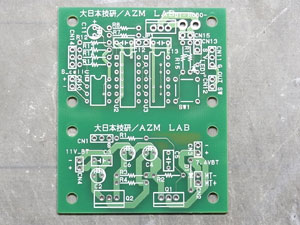
機体への搭載方法
機体への搭載は、四隅の穴を利用して、3mmのネジで固定してください。
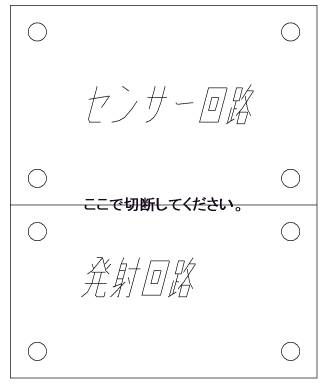
2つの回路を1枚の基板にまとめていますので、必要に応じて基板を分割して使用してください。
糸鋸等で切断できます。

2つの回路を1枚の基板にまとめていますので、必要に応じて基板を分割して使用してください。
糸鋸等で切断できます。
組み立て注意点
特に難しい部分は有りませんので、背の低い部品から取り付けて下さい。
はんだ付けに慣れていない方は、以下の点に注意して下さい。
1) はんだ付けの際、長時間半田ごてを当て続けないで下さい。
半田ごてを部品に当て続けると、熱で部品が破壊される事があります。
半田付けの時間は、あるメーカさんでは「こて先最大温度350℃ 最大5 秒以内」を基準としていました。
これを超えたから直ぐに壊れるわけでは無いのですが、20〜30秒も半田をあて続けたらICが壊れれる可能性はかなり高いといえます。
特にICは、熱に弱いので1本の足ごとに数秒で終らせて下さい。
もし上手く行かない場合でも数秒当ててしまったら、一旦半田ごてを外して、
冷ましてから再度行うようにして下さい。
*はんだ付けに自信の無い方は、ICソケット(参考1)(参考2)を使用すると、ICを熱破壊する心配がなくなります。
ICソケットは、ICをはんだ付けしないでコネクター相当の物だけはんだ付けし、後からICを差し込んで使用するものです。
2) 他力本願で申し訳有りませんが、はんだ付けの基礎が載っているHP等見てから、はんだ付けして見てください。
以下参考URLです。
http://homepage1.nifty.com/x6/elecmake/solder.htm
http://www.google.co.jp/search?q=%E3%81%AF%E3%82%9...
はんだ付けに慣れていない方は、以下の点に注意して下さい。
1) はんだ付けの際、長時間半田ごてを当て続けないで下さい。
半田ごてを部品に当て続けると、熱で部品が破壊される事があります。
半田付けの時間は、あるメーカさんでは「こて先最大温度350℃ 最大5 秒以内」を基準としていました。
これを超えたから直ぐに壊れるわけでは無いのですが、20〜30秒も半田をあて続けたらICが壊れれる可能性はかなり高いといえます。
特にICは、熱に弱いので1本の足ごとに数秒で終らせて下さい。
もし上手く行かない場合でも数秒当ててしまったら、一旦半田ごてを外して、
冷ましてから再度行うようにして下さい。
*はんだ付けに自信の無い方は、ICソケット(参考1)(参考2)を使用すると、ICを熱破壊する心配がなくなります。
ICソケットは、ICをはんだ付けしないでコネクター相当の物だけはんだ付けし、後からICを差し込んで使用するものです。
2) 他力本願で申し訳有りませんが、はんだ付けの基礎が載っているHP等見てから、はんだ付けして見てください。
以下参考URLです。
http://homepage1.nifty.com/x6/elecmake/solder.htm
http://www.google.co.jp/search?q=%E3%81%AF%E3%82%9...
組み立て確認
組み立て後配線の接続をよく確認して下さい。特に電源の誤接続に注意してください。
動作確認
発射回路
1) まずCPUに接続する前に、電源にとモータだけに接続してください。
2) CN3の1,2ピンにテスターを当てて、約6Vなのを確認してください。
3) CN2の1,2ピンにテスターを当てて、約0Vなのを確認してください。
上記の通りで無い場合接続を確認してください。
2) CN3の1,2ピンにテスターを当てて、約6Vなのを確認してください。
3) CN2の1,2ピンにテスターを当てて、約0Vなのを確認してください。
上記の通りで無い場合接続を確認してください。
センサー回路
1) 完成したらマイコンボードにつなぐ前に、5Vの電源につなぎ動作確認をします。
2) 太陽電池にアルミホイルをかけ、完全に遮光します。
3) ボールペン等でアルミホイルに2〜3個穴を開けます。
この際、太陽電池に自分の影が映りこまないようにしてください。
かなり敏感に反応してしまいます。
4)電源を入れVR1を回転させて、D1が点灯するポイントを探します。
LED1は、1回点灯したらVR1を回しても、リセットSWを押すまで消灯しません。
4) D1が点灯した際ピンが3.5〜5Vなのを確認します。
2) 太陽電池にアルミホイルをかけ、完全に遮光します。
3) ボールペン等でアルミホイルに2〜3個穴を開けます。
この際、太陽電池に自分の影が映りこまないようにしてください。
かなり敏感に反応してしまいます。
4)電源を入れVR1を回転させて、D1が点灯するポイントを探します。
LED1は、1回点灯したらVR1を回しても、リセットSWを押すまで消灯しません。
4) D1が点灯した際ピンが3.5〜5Vなのを確認します。
動作不良に対する補足
動作不良は、以下の場合が多いようですので注意してください。
1) 半田付け不良。
2) 配線の引き回不良。
配線の基本は出来るだけ太く短くです。
センサー基板からの各配線は、最低限の長さで引き回し、電流の流れる線(サーボ等)の配線と平行に這わさない様にしてください。
3) 電動ガンのモーターは最大のノイズ発生源ですので、センサー基板、CPU基板を近くに配置しないで下さい。
もし他に置く所が無い場合、電動ガンとの間にスペーサーを入れる等して、出来るだけ離してください。
*RC乗っ取り回路用の電源を追記しました。
RC乗っ取り回路を使用する場合、外部に回路図の様な電源を追加し、RCB-3へのCNを利用して電源を接続してください。
1) 半田付け不良。
2) 配線の引き回不良。
配線の基本は出来るだけ太く短くです。
センサー基板からの各配線は、最低限の長さで引き回し、電流の流れる線(サーボ等)の配線と平行に這わさない様にしてください。
3) 電動ガンのモーターは最大のノイズ発生源ですので、センサー基板、CPU基板を近くに配置しないで下さい。
もし他に置く所が無い場合、電動ガンとの間にスペーサーを入れる等して、出来るだけ離してください。
*RC乗っ取り回路用の電源を追記しました。
RC乗っ取り回路を使用する場合、外部に回路図の様な電源を追加し、RCB-3へのCNを利用して電源を接続してください。
LED1を明るくしたい場合や色を選びたい場合
R16の値を小さくする事で調整できますが、計算が必要です。
計算式は以下の通りです。
電源電圧E(V)−LEDに加える電圧(V)
電流制限抵抗R(Ω)=-------------------------------------------------------------
LEDに流したい電流(A)
今回の場合ですと
5V−使用LED VF(V)
電流制限抵抗R16(Ω)=-------------------------------------------------------------
最大6mA(TTL ICの出力上限による)
VFは、この電圧以上かけないとLEDが光りませんよ、と言う電圧です。
LEDを売り場で見ると、必ず書いてあります。
LEDに流したい電流が最大6mAと言うのは、ICの能力的上限の為です。
(実際は最大8mAなのですが、素子にバラツキがあるため余裕を見て使用します。)
例)青色LED 豊田合成 E1L53−AB1A2−05(千石電商で販売)
この青色LED の場合VF=3.6ですので
5V−3.6V
電流制限抵抗R16 233.3(Ω)=------------------------------------
6mA(=0.006A)
ただし、抵抗はこの通りの数値の物は売っていないので、近い物から探す事になります。
この場合、一般的に入手出来る抵抗で最も近いのは、240Ωと成ります。