OpenCV::ホモグラフィ
最終更新:
![]() mikk_ni3_92 2008年10月24日(金) 14:44:00履歴
mikk_ni3_92 2008年10月24日(金) 14:44:00履歴
現在地 >> メニュー >> サンプルコード::OpenCV >> OpenCV::ホモグラフィ
関連:OpenCV::射影幾何学
ホモグラフィ
3次元空間のある平面から、別の平面へ投影する時にホモグラフィー行列が使われる。
例えば、3次元空間上のある点Q(X,Y,Z)が何らかの平面上にあるとする。
そして、それを別の平面へ投影し、その点がq(x,y)である場合、
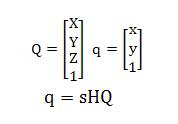
と書く事ができる。
ここで、
ホモグラフィ行列
ホモグラフィ行列は2つの要素から成り立つ
ここで、
と書ける。
なお、「Q」のZ座標を無視しても一般性は失われないので、計算上は2次元としてよい。
つまり、変換は以下の式で書くことができ、3×3の行列となる。
[例]:ホモグラフィ行列Hを求める
配列「first」と「second」の要素が対応するとしている。
メモ
■リファレンス ※このリファレンスは「OpenCV1.0ver」(08.10.24時点)。「ver1.1」以上では、3引数から6引数に変更されている。
関連:OpenCV::射影幾何学
ホモグラフィ 
3次元空間のある平面から、別の平面へ投影する時にホモグラフィー行列が使われる。
例えば、3次元空間上のある点Q(X,Y,Z)が何らかの平面上にあるとする。
そして、それを別の平面へ投影し、その点がq(x,y)である場合、
と書く事ができる。
ここで、
- s → スケール係数
- H → ホモグラフィ行列
ホモグラフィ行列
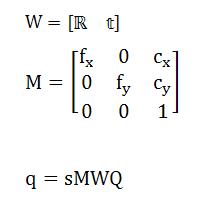
ホモグラフィ行列は2つの要素から成り立つ
- 「回転、並行移動」の要素
- 「投影変換」の要素
ここで、
- 回転・並行の要素をもつ行列を「W = [R t]」
- 投影変換の要素をもつ行列をM(カメラの内部行列)
と書ける。
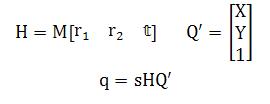
なお、「Q」のZ座標を無視しても一般性は失われないので、計算上は2次元としてよい。
つまり、変換は以下の式で書くことができ、3×3の行列となる。
[例]:ホモグラフィ行列Hを求める
配列「first」と「second」の要素が対応するとしている。
#include <iostream>
#include <cv.h>
//------------ 各種外部変数 ----------//
double first[12][2] =
{
{488.362, 169.911},
{449.488, 174.44},
{408.565, 179.669},
{364.512, 184.56},
{491.483, 122.366},
{451.512, 126.56},
{409.502, 130.342},
{365.5, 134},
{494.335, 74.544},
{453.5, 76.5},
{411.646, 79.5901},
{366.498, 81.6577}
};
double second[12][2] =
{
{526.605, 213.332},
{470.485, 207.632},
{417.5, 201},
{367.485, 195.632},
{530.673, 156.417},
{473.749, 151.39},
{419.503, 146.656},
{368.669, 142.565},
{534.632, 97.5152},
{475.84, 94.6777},
{421.16, 90.3223},
{368.5, 87.5}
};
//------------ メイン関数 ---------------//
int main(int argc,char *argv[])
{
CvMat *firstM = cvCreateMat(12,2,CV_64FC1);
cvSetData(firstM,first,firstM->step);
CvMat *secondM = cvCreateMat(12,2,CV_64FC1);
cvSetData(secondM,second,secondM->step);
CvMat *Homography = cvCreateMat(3,3,CV_64FC1);
cvFindHomography(firstM,secondM,Homography);
for(int y = 0; y < 3;++y){
for(int x = 0; x < 3;++x)
{
std::cout << CV_MAT_ELEM(*Homography,double,y,x) << " ";
}
std::cout << "\n";
}
cvReleaseMat(&firstM);
cvReleaseMat(&secondM);
cvReleaseMat(&Homography);
return EXIT_SUCCESS;
}
メモ
- ホモグラフィ行列Hの計算には、最低4つの点が必要である。
- スケーリングはホモグラフィ行列Hの最後の要素で可能だが、普通は「スケール係数s」で行う。
■リファレンス ※このリファレンスは「OpenCV1.0ver」(08.10.24時点)。「ver1.1」以上では、3引数から6引数に変更されている。

