Felix 
マシンデータ
| Name | Felix |
| View | 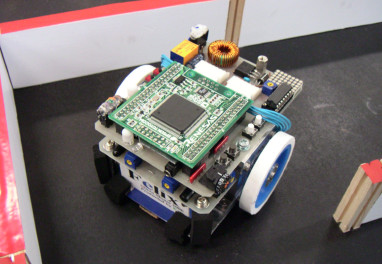 |
| Width | 102mm |
| Length | 106mm |
| Height | 72mm |
| Weight | 670g |
| Wheel | d:49mm w:8mm (silicon tire + handmade plastic wheel) |
| Processor | SH2-7144F |
| Motor | PK233PA (Oriental motor) |
| Battery | NiMH(AAA) 850mAh 8cell |
| Motor Driver | FET Direct (2SK2399) |
| Sencer | infrared light sencer ( OSIR5111A/OptoSupply + TP500/SHARP ) |
| Top Speed | 2.3 m/s |
| Start Acceleration | 4.9 m/s^2 |
| Turn Speed | 0.5 m/s |
| UserInterface | rotary dip sw, push sw x 4, fullcolor LED, speaker, dotmatrix LED(7x5) |
センサー
・赤外アナログ光センサです。およそ距離の2乗に比例した平滑な出力を得ます。
出力が低レベルのときはほぼ外乱をカットしますが、出力が大きくなると いくらか外乱に弱くなります。
・オペアンプはLM2904を使用し、発光パルスは6kHz、デューティー25%を使用。 やけに周波数が高いのは昇圧回路の制御と同じタイマを使っているからです。
・TP500などという型落ち品のフォトトランジスタ(ジャンク屋で発見)を使っている上、 今考えると不要な部品があったりなかったり。電子回路の知識は全然なので…
昇圧回路
・Felixには昇圧回路が搭載されていますが、構成はたったこれだけです。
ちゃんとした昇圧素子を使わないのは、中身が見えないものは あまり使いたくないというのと、あと値段が高いからです。
・10kHzぐらいで制御すると良いかと思われます。デューティー50%以上の動作は保障できません。 電源が優秀なら10V→20Vで2Aはいけます。(電池ボックスなんか使ってたら無理です)
・見れば分かると思いますが、FETへの入力がHighになり続ければ、 ほぼショートと同様になります。インダクタの巻線抵抗なんて無いに等しいですからね。 実際、実験回路を一つ焼きました。
搭載にあたっては、何重ものソフトウェア的なセーフティ、またショートすると マイコンリセットがかかって自動的にリレーが遮断されるという回路的な安全装置付きでした。
この回路によるいかなる損害も補償いたしません。参考にする場合は自己責任でお願いします。