
後期中間試験テスト対策/ロボット工学/ユニバーサル…
ユニバーサルジョイントのイメージ図
こんな感じに動いているようです。(軸先がうまく固定されてないとか、そんな野暮なことを言ってはいけません)
サンプルムービー1
サンプルムービー2(力を伝えるほうだけ)
サンプルムービー3(要らない軸を削ったやつ)
以下適当な説明。誰か適当に直して。。。。
緑の軸と、赤、青の軸を見比べてみればジョイントの中が二つとも回転しているのが良くわかるはず。
力の伝播のイメージがしにくければ、蛇腹のストローを曲げて、ユニバーサルジョイントと同じように回してみればあんなカーブになってるのが少しは解るかも(w
ユニバーサルジョイントの問題
間違いがあるかもしれません!!注意!

図にあるようなユニバーサルジョイントを考えます。十字のクロスしてある部分をOとしておきます。
そして単位ベクトルi(赤), j(緑), k(青)を導入しておきます。単位ベクトルは使いやすいように2セット用意します。まず,左の回転軸用のベクトル{i0,j0,k0}と,それに対して右の回転軸は手を曲げることができるために傾きます。その傾いたときを単位ベクトルとしたものが{i0,j0,k0}の単位ベクトルです。図ではまだ傾いていないために,この二つの単位ベクトルは等しくなります。

上の図は,ユニバーサルジョイントをαだけ傾けた図です。このように回転する力の方向を変えることができるのはユニバーサルジョイントの特徴です。ここで前の図とよく見比べてみてください。方向を変えたために新しい軸ができました。ここでオレンジ色を新しくid,マゼンタ色をkdとします。さて,idやkdがあるのに何かもう一つあると思った皆さん,正解です。jdができてていません。このひねり方に注意すると,実をいうとjdは変化していません。もとのj0(緑色)と重なっているのです。

さてぼちぼちはじめましょうか。回転の度合いがわかるように,左の軸と右の軸,どれがどのくらい回転したかを調べるために,軸のある場所に名前を付けましょう。上図の,赤いボールの位置をP,青いボールの位置をQと名前をつけます。するとOからPに伸びるベクトルOPは単位ベクトル{i0,j0,k0}を使って,OからQに伸びるベクトルは単位ベクトル{id,jd,kd}を使って次のように表せます。rはOからの距離だと考えてください。

このあたりから更に難しくなります。

さて何が変わったでしょうか。いきなりこうでは分かりませんね。t-treeさん特製の図で理解をしましょう。次の図をみてください。

この図には,もともとの左の回転軸の面影があります。回転軸についてちょっと注意をしておくと,左側の軸の回転をθで表し,右側の軸の回転をφで表すとします。初期状態をどちたともθ=φ=0とします。
このもともとの位置からθだけ回転させたP(赤ボール)の位置をP’とします。ではこれの回転をしらべるためにこのP’はどこにあるのかを考えます。このP’を{i0(赤),j0(緑),k0(青)}の単位ベクトルで表します。このときボールはi0方向に動いていないですよね。つまりi0成分はゼロです。つまりj0とk0の平面で回転を行っているのです。

この式がP’の位置となるわけです。
さてさて,左の軸が回転するということは,右の軸も回転するということです。この回転を調べることにしましょう。次の図をみてください。

ここではもともとの右の回転軸の位置が残してあります。これと,回転した後の点をQ’(青ボール)とします。ここでこの位置を特定するのですが,先ほどの単位ベクトル{i0,j0,k0}は使いません。ユニバーサルジョイントの問題の二つ目の図をみてください。この右側の回転軸は,i0に対しては動きを見せますが,id(オレンジ)に対しては動きません。(仮に動いていたとすると,軸が前後にうごいたことになります)つまりこの右側の軸の運動は先ほどと同じように{jd(緑),kd(マゼンタ)}だけの回転運動となるわけです。するとこの点は次の式で与えられます。

本題はこれからです。二つの回転軸を傾けていなかったときは i0やidは等しかったのですが,軸を傾けることによってこの二つの単位ベクトルは異なってしまいました。これからこの二つの単位ベクトルの関係性について調べます。

上の図は傾きαだけずらした時の単位ベクトル表しています。軸をずらしてj0とjdだけは変化しないことは分かっています。この図にはベクトル j0とjdがありませんがこれらは画面から手前方向に向いています。この図の関係から下の式が導かれます。

この関係をもとに,OQ’ベクトルの位置を{i0,j0,k0}を使った式に直してみましょう。これは簡単です。kdなどに先ほどの式を代入するだけですから。そうするとOQ’ベクトルはこうなります。

皆さん,よく図をにらんでください。あのクロスしている場所は,本当に直角なのでしょうか。そうなんです。直角なのです。そういうふうに設計していますから。すると,OP’ベクトルとOQ’ベクトルはどんな関係があるでしょう。OP’とOQ’は中心からそれぞれのクロスの方向に出ているベクトルですね。つまり,この二つは直角にまじわります。そう,ない積がゼロとなるのです。
内積の計算はおぼえていますか?そう,成分同士を掛けるのです。i0の係数同士,j0の係数同士,k0の係数同士。そして成分同士を掛けた値を足すのです。
今言っているのは,その成分同士の掛け算のそれぞれの和がゼロだってこと。そこからこんな関係が導けませんか?

計算すると一行目の式が出てきます。二行目はcosφで両辺を割っています。三行目は更にcosθで割っています。するとこんな関係が導けます。最後の式に注目。これは後々使います。
求めたいものは回転速度の比でしたよね。つまり dθ/dt と dφ/dtの比。そのためには,先ほどの式を微分してみましょう。θはある時間tの関数とかんがえておきます。φも同じく。そして最後の式の二項目を移項し,左辺を微分します。
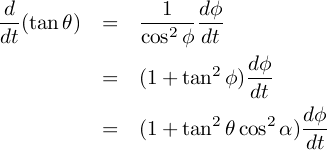
一行目は普通に微分した結果です。合成関数の微分なので,dφ/dtを忘れないように。二行目は三角関数の変形,三行目へは先ほど注目といった式を代入しました。次に右辺を微分します。

これも微分です。cosαが定数ということをお忘れなく。もともとが等式なので両辺を微分しても結果は同じになります。両辺を等号で結ぶと次の式となります。

二行目へは,求める式が回転速度の比ということで,キレイに整理しました。最終的な結果へは,三角関数の公式を使えば出せます。
(責任は負いません。各自計算し下さい。)
(書きかけ)
2005年12月01日(木) 19:50:01 Modified by c_5
添付ファイル一覧(全19件)
30d9d8d5e56cff5c.png (2.04KB)
Uploaded by c_5 2005年12月01日(木) 19:41:24
Uploaded by c_5 2005年12月01日(木) 19:41:24
03198f8ab1beea3c.png (3.11KB)
Uploaded by c_5 2005年12月01日(木) 19:36:59
Uploaded by c_5 2005年12月01日(木) 19:36:59
cea6be2cba0806f4.png (1.61KB)
Uploaded by c_5 2005年12月01日(木) 17:25:32
Uploaded by c_5 2005年12月01日(木) 17:25:32
a563e01aa978ea36.png (6.76KB)
Uploaded by c_5 2005年12月01日(木) 17:21:52
Uploaded by c_5 2005年12月01日(木) 17:21:52
aaaa50cca703d465.png (1.88KB)
Uploaded by c_5 2005年12月01日(木) 16:25:57
Uploaded by c_5 2005年12月01日(木) 16:25:57
e955b3ac825c9be5.png (15.33KB)
Uploaded by w16c5 2005年12月01日(木) 15:26:12
Uploaded by w16c5 2005年12月01日(木) 15:26:12
e0a66d9a6aea10df.png (17.62KB)
Uploaded by w16c5 2005年12月01日(木) 15:25:58
Uploaded by w16c5 2005年12月01日(木) 15:25:58
98d29445e436d302.png (20.26KB)
Uploaded by w16c5 2005年12月01日(木) 15:23:31
Uploaded by w16c5 2005年12月01日(木) 15:23:31
4a057e2b73b3f11f.png (3.95KB)
Uploaded by c_5 2005年12月01日(木) 15:08:14
Uploaded by c_5 2005年12月01日(木) 15:08:14
11749b6c81f97b17.png (16.72KB)
Uploaded by w16c5 2005年12月01日(木) 15:05:56
{kind=link}
Uploaded by w16c5 2005年12月01日(木) 15:05:56
4187722f42d9346a.png (19.01KB)
Uploaded by w16c5 2005年12月01日(木) 15:01:40
Uploaded by w16c5 2005年12月01日(木) 15:01:40
0cf45abaf2ca89ee.png (10.80KB)
Uploaded by w16c5 2005年12月01日(木) 15:01:05
{kind=link}
Uploaded by w16c5 2005年12月01日(木) 15:01:05
8d984198f30190b9.png (1.20KB)
Uploaded by c_5 2005年12月01日(木) 14:34:32
Uploaded by c_5 2005年12月01日(木) 14:34:32
b231f4487a4adb03.png (1.69KB)
Uploaded by c_5 2005年12月01日(木) 14:30:11
Uploaded by c_5 2005年12月01日(木) 14:30:11
7c5f5b364689aefb.png (1.49KB)
Uploaded by c_5 2005年12月01日(木) 14:29:40
Uploaded by c_5 2005年12月01日(木) 14:29:40
c2abda856ab9298f.png (1.43KB)
Uploaded by c_5 2005年12月01日(木) 14:29:27
Uploaded by c_5 2005年12月01日(木) 14:29:27
2e15e921cc659eac.png (10.67KB)
Uploaded by t__tree 2005年12月01日(木) 13:58:22
Uploaded by t__tree 2005年12月01日(木) 13:58:22
2195a444ece60525.png (11.78KB)
Uploaded by t__tree 2005年12月01日(木) 13:56:44
{kind=link}
Uploaded by t__tree 2005年12月01日(木) 13:56:44
6381292e53a6c56f.png (10.80KB)
Uploaded by t__tree 2005年12月01日(木) 13:55:10
Uploaded by t__tree 2005年12月01日(木) 13:55:10