
後期末試験テスト対策/ロボット工学/スライディング…
スライディングモード制御
教科書 P128を参照。
スライディングモード制御とは,制御系の構造を切り替えることにより望みの特性を実現する制御方法である。
と教科書に書いてあります。つまり,こういう場面ではこっちの制御系,そうでない場合はこっちの制御というように場面に分けて制御する方法のことを言います。
といってもうまく伝わりませんが,いままではスイッチのように切り替えて制御が出来なかったのですが,最近のディジタル制御だとif文によって場合を決めてやることが出来るのです。
位相平面

教科書には位相平面の図がありますが,まずこれを説明しておきましょう。横軸にx座標(位置),縦軸にdx/dt(速さ)をとっています。運動には早さや位置があるので,運動の動きはこの二つの状態をとれはこの平面の一転に定まるのです。つまり,速さと位置が決まれば,速さを縦軸に,位置を横軸に決めれば平面に一つの点を打つことができます。それが時間がたつと位置も速さも変化するのでまた点を打つことになります。これを繰り返していくことにより,平面に曲線を引くことが出来るのです。
参考に出した図の平面は,バネの動き(摩擦無し)を表したものです。バネが一番右端(dx/dt = 0で右端)からスタートして,上の円弧をとおり,最高速度に達するときには(下図a),その位置は0(つまり何も引っ張ったり押したりしていない状態)となります。それから左に行けばいくほど速度が落ちて,左端では速度dx/dt=0となります(下図b)。次に右にバネが触れるわけですが,今度は速度が先ほどと逆となるのでdx/dt < 0の下側の円弧を右に移動し(下図c),もとの位置に戻るわけです(下図d)。

制御
さてさて,制御系においてこんなバネのような振動をしていては,いつまでたっても目的の値に動作させることはできません。つまり x の値を目的からどれだけ離れているかという量だと考えると,xは最終的にゼロ。その速度 dx/dtも最終的にゼロにならなくてはなりません。つまり,下図のようにだんだん dx/dt も,x (誤差)も小さくなっていかなくてはなりません。このように制御するのです。

スライディングモード制御
ここからは難しくなります。とりあえず,この位相平面を二つに分割してその領域ごとに入力を変化させると思ってください。するとなぜかうまくいくんです!!教科書の図をみてください。今,切り替える入力としてP129の図(a)と図(b)のような入力の結果があるとします。これを場合分けして入力するのです。
どのように場合分けしているかは下図のようになっています。まぁ教科書どおりですが。

つまり領域Iの速度と位置を持つときには入力 u+を,領域IIの速度と位置を持つときには入力 u-を入力として入れるわけです。そしてこの分割している直線 s = 0 の傾きを(式5.42のように) うまいこと選ぶとスライディングが発生します。
スライディング
さて,スライディングとは何でしょうか。教科書を読むとスライディングは図(c)のようになっているときですね。図(d)はs=0をスライディングしないように選んだときの図です。この図(c)で起こっているスライディングとは,制御対象(バネとか振り子とかシーソーだとかいま制御したい対象のこと)が,その s = 0という直線に沿って原点まで達する現象のことをいいます。図(c)をよく見ると,s = 0 の直線に沿って矢印が原点の方向に描かれているのが分かります。
この原点というのは,速度も誤差もない一番いい状態のことです。というのは制御のところで説明しました。そして,スライディングしている状態というのは,一番早く原点まで移動できる処理のことなのです。つまり最短時間で制御対象を目的の状態にすることができるのです。
図(d)を見てください。スライディングのない場合では,渦巻状に原点にたどり着いています。この図の x だけに注目すると,右へ左へ行ったり来たりを繰り返すことになります。つまり目標の状態へたどりつくまでにかなり振動することになります。フラついている状態ですね。
図(c)のスライディングしている状態をみてください。s = 0の直線の上をスッと原点までたどり着いていることが分かります。ということは,x だけに注目してみるとフラつくことなく目標までたどりつけたということですね。これは最適な状態なのです。これがスライディングです。
P139 問題5.6
このスライディングの問題として,どんなふうに原点までたどり着くのかを答える問題がでています。
スライディングが発生すると,先ほど説明したように s = 0の直線をスッと原点まで移動することが分かっています。ここで重要なのは s = 0という直線の式なのです。これはP129の式(5.41)から,s = 0は

ということがわかります。

という関係からこれは1次の微分方程式であることが分かります。オーソドックスに変数分離をして,両辺を積分すると,

という答えを得ることになります。計算の最期にe^Aをx0と置きました。これはt=0のときにx=x0となることから得ることができます。この解答をもとにグラフをかいてみると,
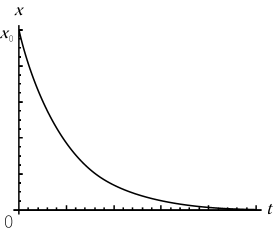
のように,ふらふらするわけでもなくスッと誤差xがゼロに近づくのです。ちなみに,位相平面が渦巻きの状態のときは下の図のようになります。かなり落ち着きがないですね…。いずれかは0に落ち着くんでしょうけど。

2006年01月31日(火) 01:24:03 Modified by w16c5
添付ファイル一覧(全9件)
5f640b744a1fcda4.png (7.01KB)
Uploaded by w16c5 2006年01月31日(火) 01:23:01
Uploaded by w16c5 2006年01月31日(火) 01:23:01
85c5a7e6e627dea8.png (5.70KB)
Uploaded by w16c5 2006年01月31日(火) 00:59:17
Uploaded by w16c5 2006年01月31日(火) 00:59:17
cd8ff2000b12cc35.png (5.52KB)
Uploaded by w16c5 2006年01月31日(火) 00:42:26
Uploaded by w16c5 2006年01月31日(火) 00:42:26
b65e813abd5aaa55.png (1.13KB)
Uploaded by w16c5 2006年01月31日(火) 00:37:15
Uploaded by w16c5 2006年01月31日(火) 00:37:15
9e4a07d0bde1b300.png (981B)
Uploaded by w16c5 2006年01月31日(火) 00:35:43
Uploaded by w16c5 2006年01月31日(火) 00:35:43
d38db1449133c4e5.png (7.75KB)
Uploaded by w16c5 2006年01月31日(火) 00:11:26
Uploaded by w16c5 2006年01月31日(火) 00:11:26
84ebb9b7bf8f5757.png (4.13KB)
Uploaded by w16c5 2006年01月30日(月) 23:08:26
Uploaded by w16c5 2006年01月30日(月) 23:08:26
4aaa4d882905f633.png (13.02KB)
Uploaded by w16c5 2006年01月30日(月) 21:37:55
Uploaded by w16c5 2006年01月30日(月) 21:37:55
be53761c72fe824a.png (8.61KB)
Uploaded by w16c5 2006年01月30日(月) 21:23:23
Uploaded by w16c5 2006年01月30日(月) 21:23:23