
後期末試験テスト対策/ロボット工学/リアプノフの…
リアプノフの安定理論
リアプノフの安定理論は本当はもっと難しいいんだけれども,簡単に説明をします。いちばん簡単な説明です。
リアプノフ関数は,なんとかかんとか教科書に書いてあるけれど,全エネルギーだと思ってください。つまり,運動エネルギー+位置エネルギーってこと。
安定するということは,エネルギーが無くなって静止するってこと。エネルギーが無くなれば物は動けないからです。安定判別ってのは,時間がたつとエネルギーが少なくなっている,つまりエネルギーの時間変化(エネルギーを時間で微分)すると,負になれば安定しますということです。
教科書には,バネのやつで計算しています。バネの運動エネルギーは (1/2)mv^2,バネの位置エネルギーは(1/2)kx^2となり全体のエネルギーEはE= (1/2){mv^2+kx^2}ですね。これを時間微分して負になっているから,安定だといっているのです。
ここでは例として,教科書 P113図5.2(b)のモデルで考えてみましょう。
例題 教P113 図5.2(b)
回転運動機構の慣性モーメントがJ,ねじりバネ剛性が kθとなっています。外力を0としたときの系の運動をかんがえよう。系の運動方程式は,入力トルクτ(t)=0より,

となり,運動エネルギーTは
位置エネルギーUは
となります。そして全エネルギーEは,E=T+Uだから,

となります。これを時間微分してみましょう。すると,
となります。
これに先ほどの運動方程式を変形して,

代入することで,
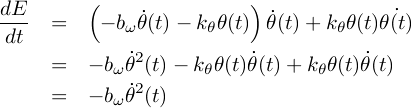
となり,bωは正なので,エネルギーの時間変化は負であることが分かります。よって系(回転運動系)は安定となるのです。
2006年01月31日(火) 20:42:19 Modified by w16c5
添付ファイル一覧(全7件)
e091a3825ce19840.png (3.13KB)
Uploaded by w16c5 2006年01月31日(火) 20:41:28
Uploaded by w16c5 2006年01月31日(火) 20:41:28
e5f7d1950ea34459.png (1.00KB)
Uploaded by w16c5 2006年01月31日(火) 20:41:01
Uploaded by w16c5 2006年01月31日(火) 20:41:01
535cf06839293307.png (2.34KB)
Uploaded by w16c5 2006年01月31日(火) 20:40:23
Uploaded by w16c5 2006年01月31日(火) 20:40:23
3a3104be6ae8ed59.png (1.46KB)
Uploaded by w16c5 2006年01月31日(火) 20:39:28
Uploaded by w16c5 2006年01月31日(火) 20:39:28
6c2ddc46f3221831.png (915B)
Uploaded by w16c5 2006年01月31日(火) 20:38:35
Uploaded by w16c5 2006年01月31日(火) 20:38:35
617a4077366617a3.png (844B)
Uploaded by w16c5 2006年01月31日(火) 20:38:13
Uploaded by w16c5 2006年01月31日(火) 20:38:13
4abdf319af0791e9.png (1.16KB)
Uploaded by w16c5 2006年01月31日(火) 20:37:31
Uploaded by w16c5 2006年01月31日(火) 20:37:31