マスターファイル のお知らせ 
| VFH マスターファイル オーロラン 【 VERITECH Fighter / Helicopter Master File VFH-10 Auroran , VFH-12 Supreme-Auroran 】 |
| マスターファイル関連のアートについては、オーロラン(マスターファイル)【 VFH-10 Auroran Armament variants 】に移しましたので、そちらをご覧下さい。 |
| オーロラン(複座型):複座攻撃型、複座偵察型、複座SAAB早期警戒機構 Eri-eye搭載型 |
| 塗装や部隊章、注意書(コーションレター)については、オーロラン(塗装例)【 VFH-10 Auroran color and markings 】に移しましたので、そちらをご覧下さい。 |
| 武装派生型については、オーロラン(武装派生型)【 VFH-10 Auroran Armament variants 】に移しましたので、そちらをご覧下さい。 |
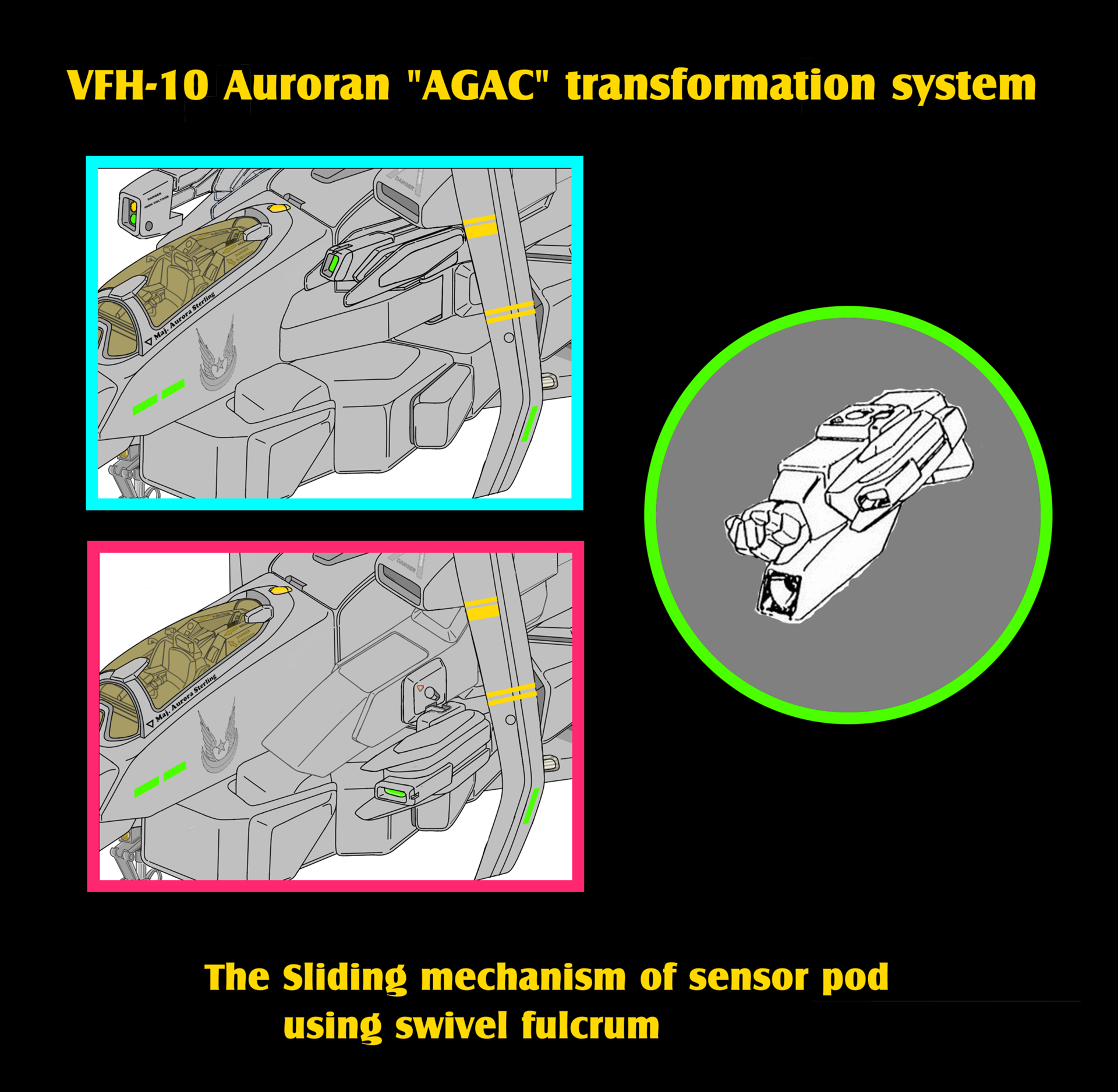
超時空騎団サザンクロス 「可変戦闘機オーロラン」スイベル支点センサーポッド滑動移動機構
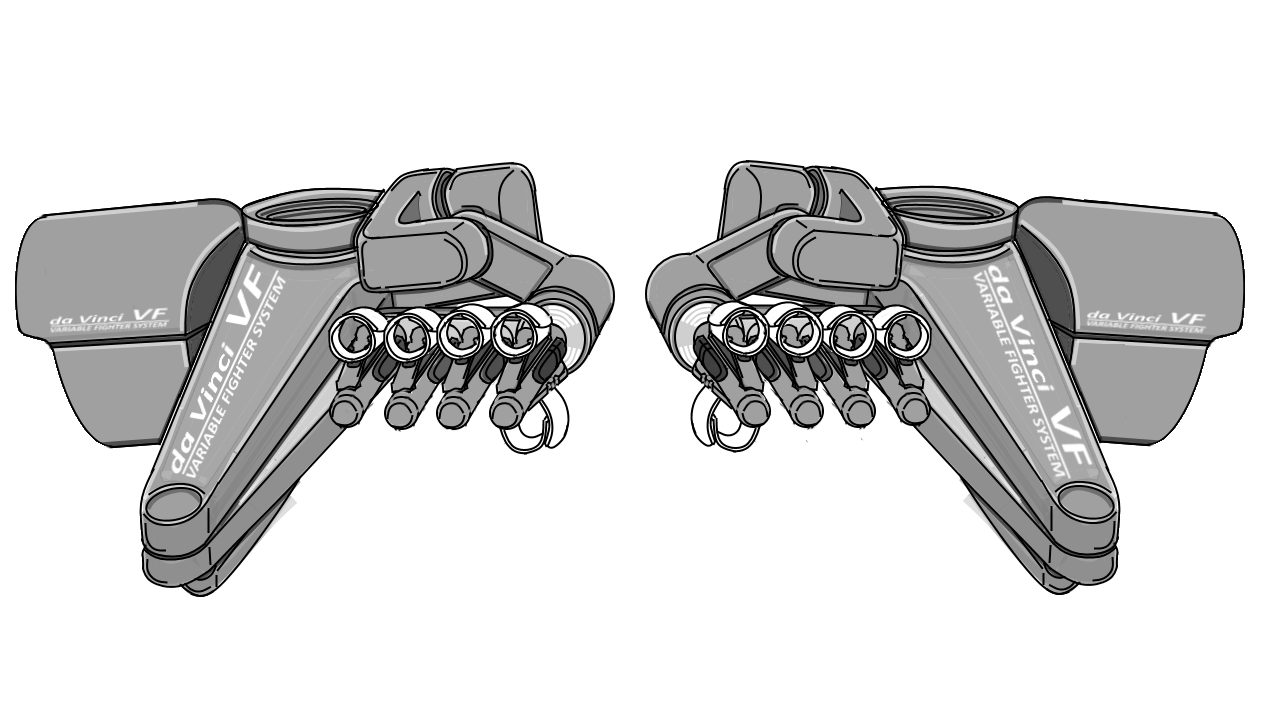
ダビンチ II 遠隔[機械手指]操作機構
- 超時空騎団サザンクロス・『ダビンチ - II 』遠隔[機械手指]操作機構 - ユイニャアのイラスト - pixiv
- 可変戦闘機のバトロイドを操縦桿だけで操作するのは無理なので,微小外科手術に用いる内視鏡遠隔装置「ダビンチ」を応用し(原型の2指操作機能を5指操作機構へと拡大)『ダビンチ-II 遠隔[機械手指]操作機構』としました。
- 実際の機体配置の左右間隔
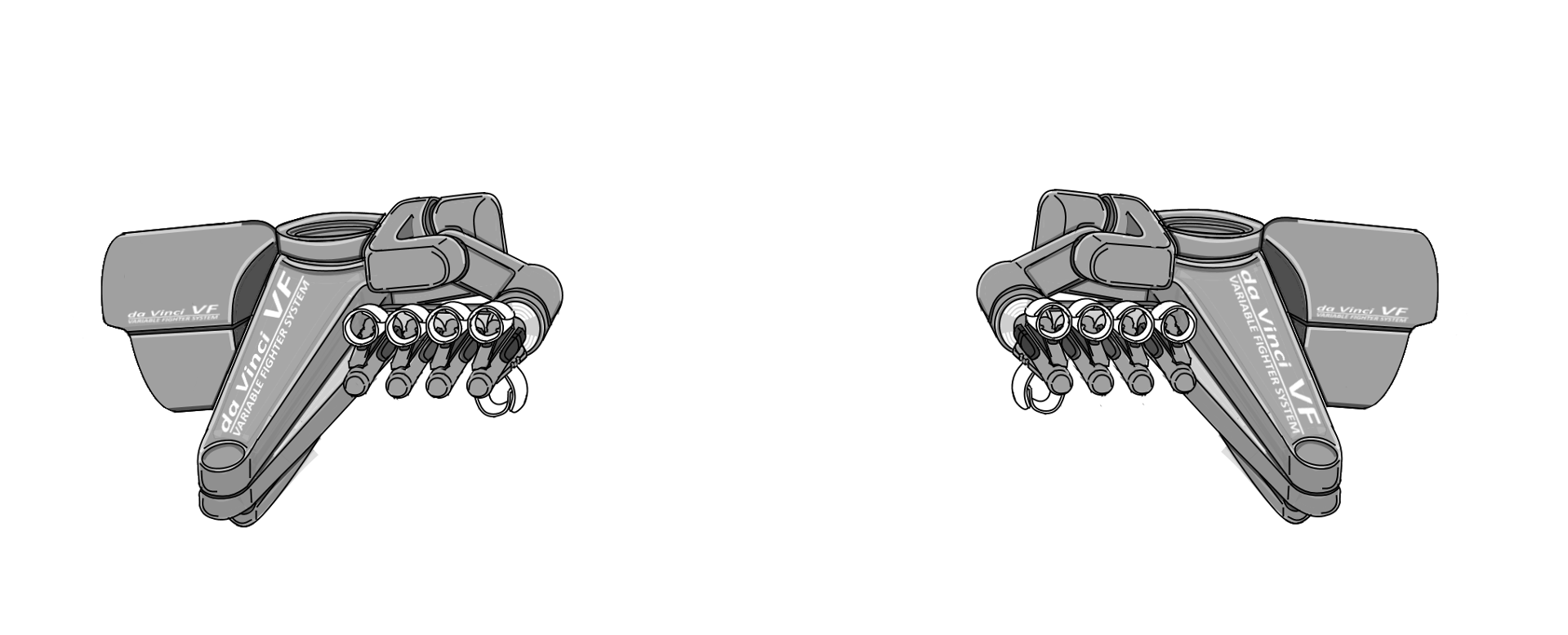
- なお、 Block 02 までは左右の操縦桿をバトロイドの手指の操作にも利用する機械手指操作のコンソールである「ダ・ビンチ II」の開発が間に合わない為、同機構は未だ装備されておらず、暫定的に従来型の操縦桿に対して「インテュイティブサージカル合同会社 - ダヴィンチ サージカル システム」のソソフトウェアのみを適用した『ダビンチ - I エレメント』を採用していました。
出典

基本型・発展型・変形過程・CG画像 記事のお知らせ
| 基本型 VFH-10 については、煩雑(はんざつ)回避の為、 下記を参照下さい。VFH-10 オーロラン |
- 発展型 「VFH-12スーパー・オーロラン」 は生産拠点が北欧(スウェーデン SAAB社)と日本国(川崎重工業)に分割され、地域派生型が生じています。
- また、特性や運用が基本型と異なる為、下記の記事に移行しました。
| 発展型 "VFH-12 Super Auroran" については、煩雑(はんざつ)回避の為、 下記を参照下さい。スーパー・オーロラン |
| 手脚ユニットを排除した派生型については、オーロラン (派生型)をご覧ください。 |
| 塗装や部隊章、注意書(コーションレター)については、オーロラン(塗装例)【 VFH-10 Auroran color and markings 】に移しましたので、そちらをご覧下さい。 |
| 資料画像については、オーロラン(資料画像)【 VFH-10 Auroran images archive 】に移しましたので、そちらをご覧下さい。 |
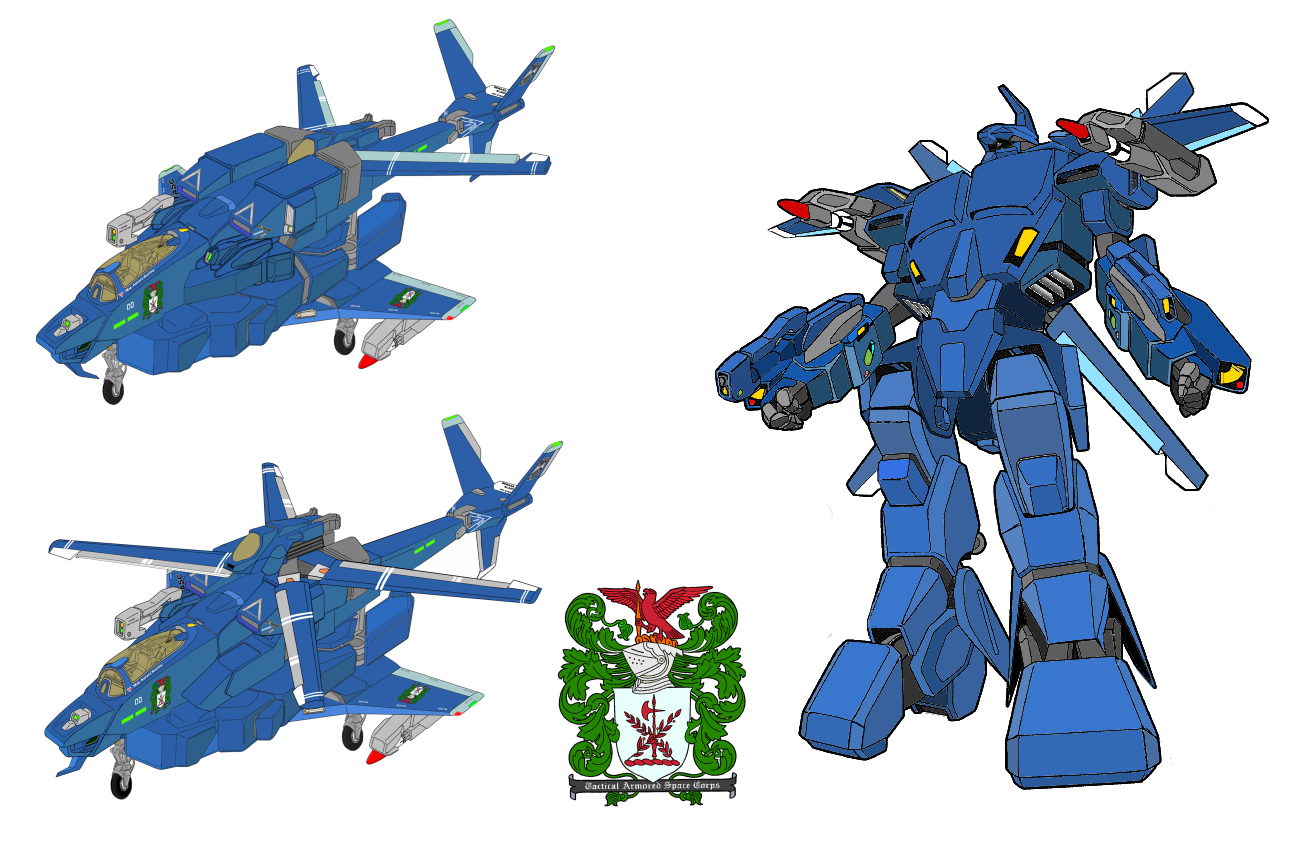
可変戦闘機 VFH-10C オーロラン 海兵隊仕様・3形態図
- 可変戦闘機 VFH-10C(C型・単座型)オーロラン 海兵隊仕様・3形態図 on pixiv
- Marine VFH-10C single-seat Auroran Three mode, Fixed-winged Fighter , Gyrodyne (Compound helicopter) , and Battloid on Deviantart
| 変形過程については、オーロラン(変形過程) 【 VFH-10 Auroran Transformation sequence 】 に移しましたので、そちらをご覧下さい。 |
| 資料画像については、オーロラン(資料画像)【 VFH-10 Auroran images archive 】に移しましたので、そちらをご覧下さい。 |
| CG画像については、オーロラン (CG画像)【 VFH-10 Auroran CG-images 】に移しましたので、そちらをご覧下さい。 |
この記事は
マスターファイル系列一覧
内部検索案内
- この案内は、Google など検索エンジンにより初訪問される方が毎月100人を超えるページ、つまり当方ロボテック・クロニクル以外には資料がない〔代替性がない〕記事の冒頭に表示します。
| 見たいページの探し方 |
目次【 Index 】
先進回転翼・準固定翼形態 VFH-10C/Gオーロラン
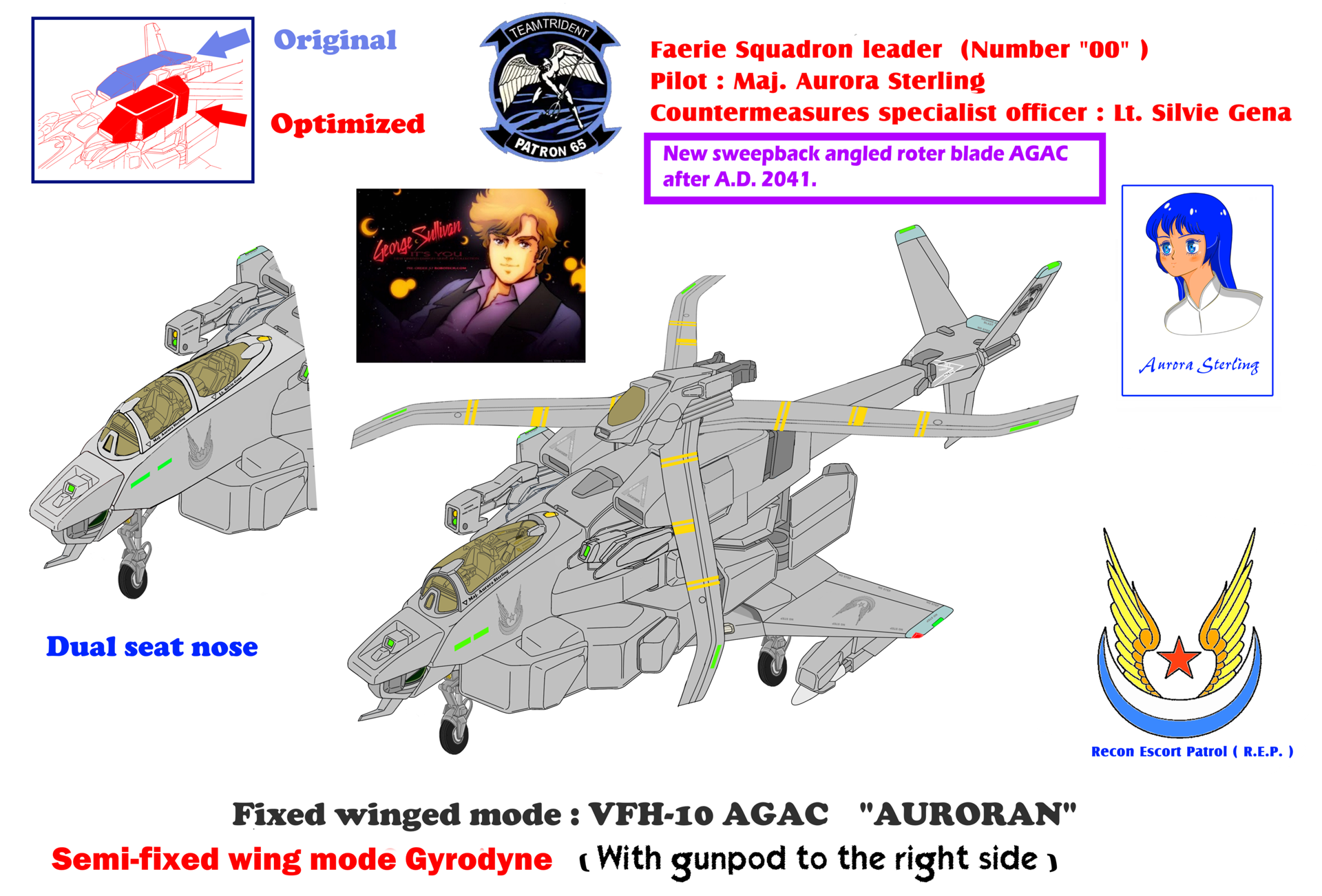
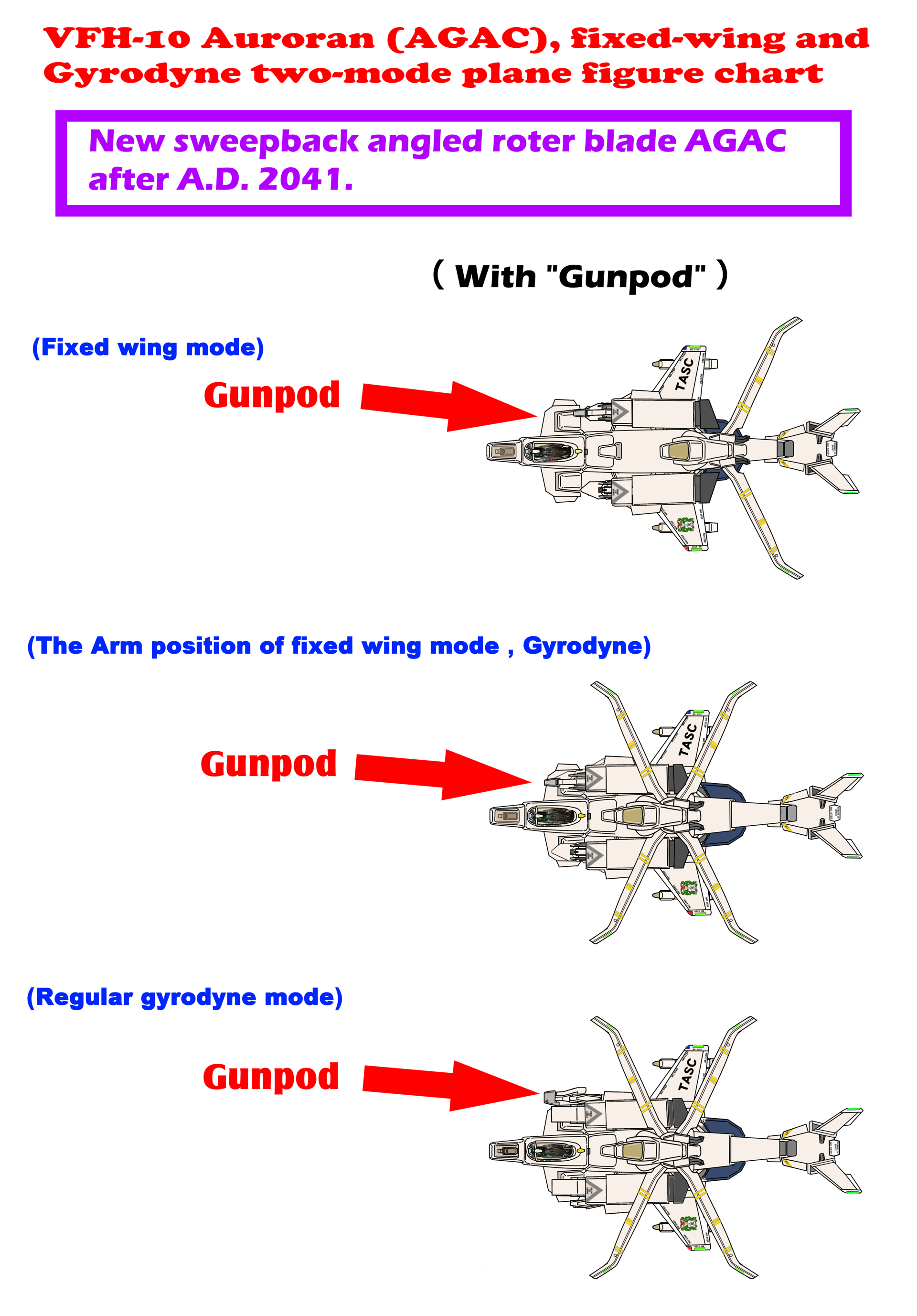
両下腕を固定翼形態のままとし、外側に90度回転させない状態で、回転翼機 としての飛行に必要なシステムのみを展開した状態。
便宜的に準・固定翼形態のジャイロダインと呼びますが、この状態でも飛行には差し支えありません。
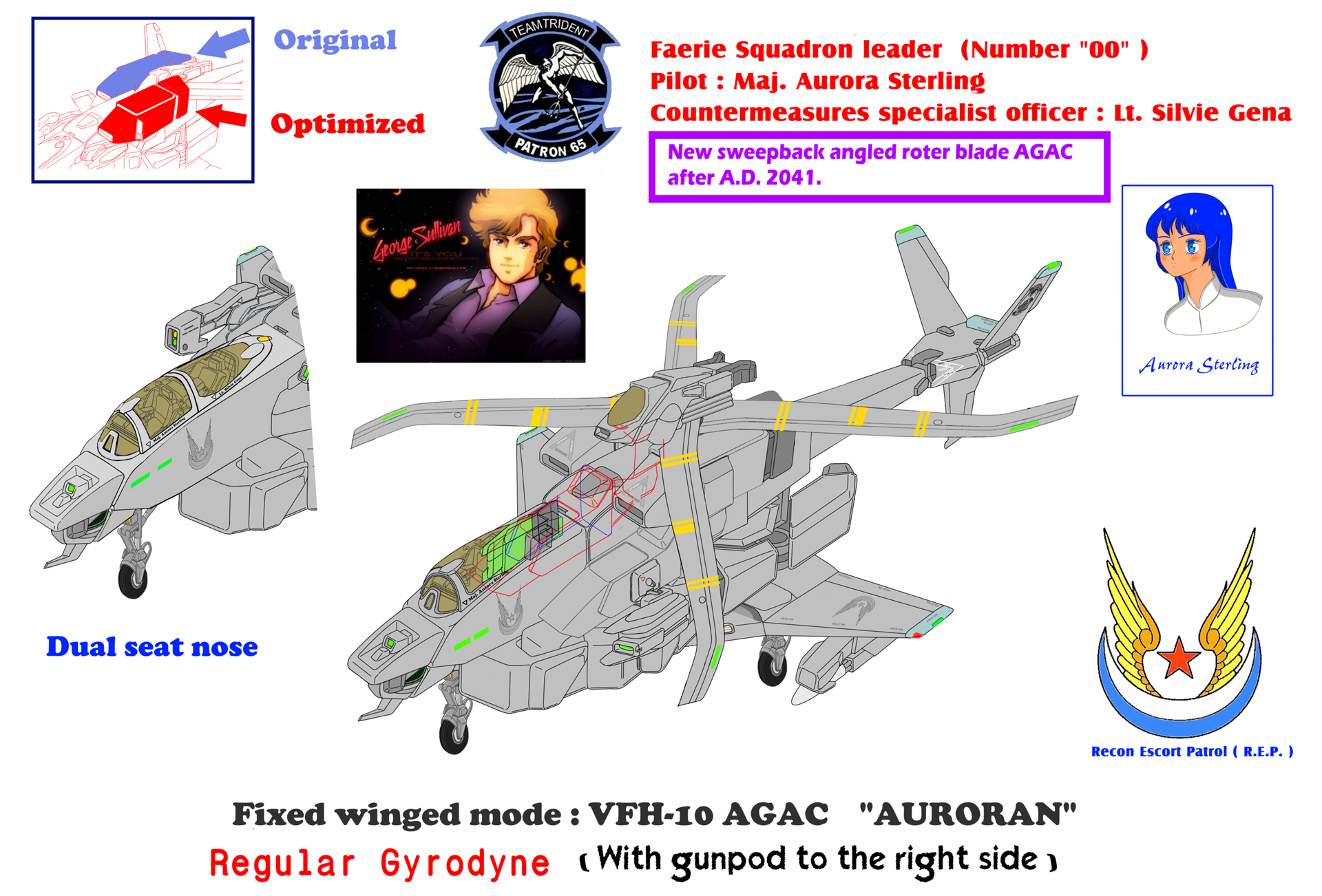
| 『VFH10 オーロラン』〔あるいは「VFH-12 スーパー・オーロラン」〕は、超時空騎団サザンクロスに登場する、「超音速ジェット戦闘機 」→「ジャイロダイン (Gyrodyne)」〔複合ヘリコプター、VF-1 バルキリーのガウォークの代替〕→「バトロイド」〔人型のロボット〕に変形する可変戦闘機です。 |
|---|
この状態で、回転翼羽根の先端に後退角の付いた発展型ローターブレード(2041年以降から)に換装した VFH-10 C(単座型)/ G(複座型)Auroran(通称 : "AGAC" )
『シコルスキー SB-1 デファイアント』【SB>1 デファイアント】の後退角のついた回転翼、しかも二重反転方式で上下のブレード間隔が従来型より狭いのに翼端が衝突しない構造は驚きでした。
その要素を採り入れた新型のローターブレードです。
正規のジャイロダイン形態は、センサーと探照灯〔サーチライト〕を地上に向ける為“だけ”の為に、両下腕が外側に、90度回転します。
上記の状態〔両下腕を固定翼形態のままとし、外側に90度回転させない〕でも「飛行には差し支えありません」が、正規ジャイロダイン形態も描いてみました。
先進回転翼・正規ジャイロダイン形態 VFH-10C/Gオーロラン
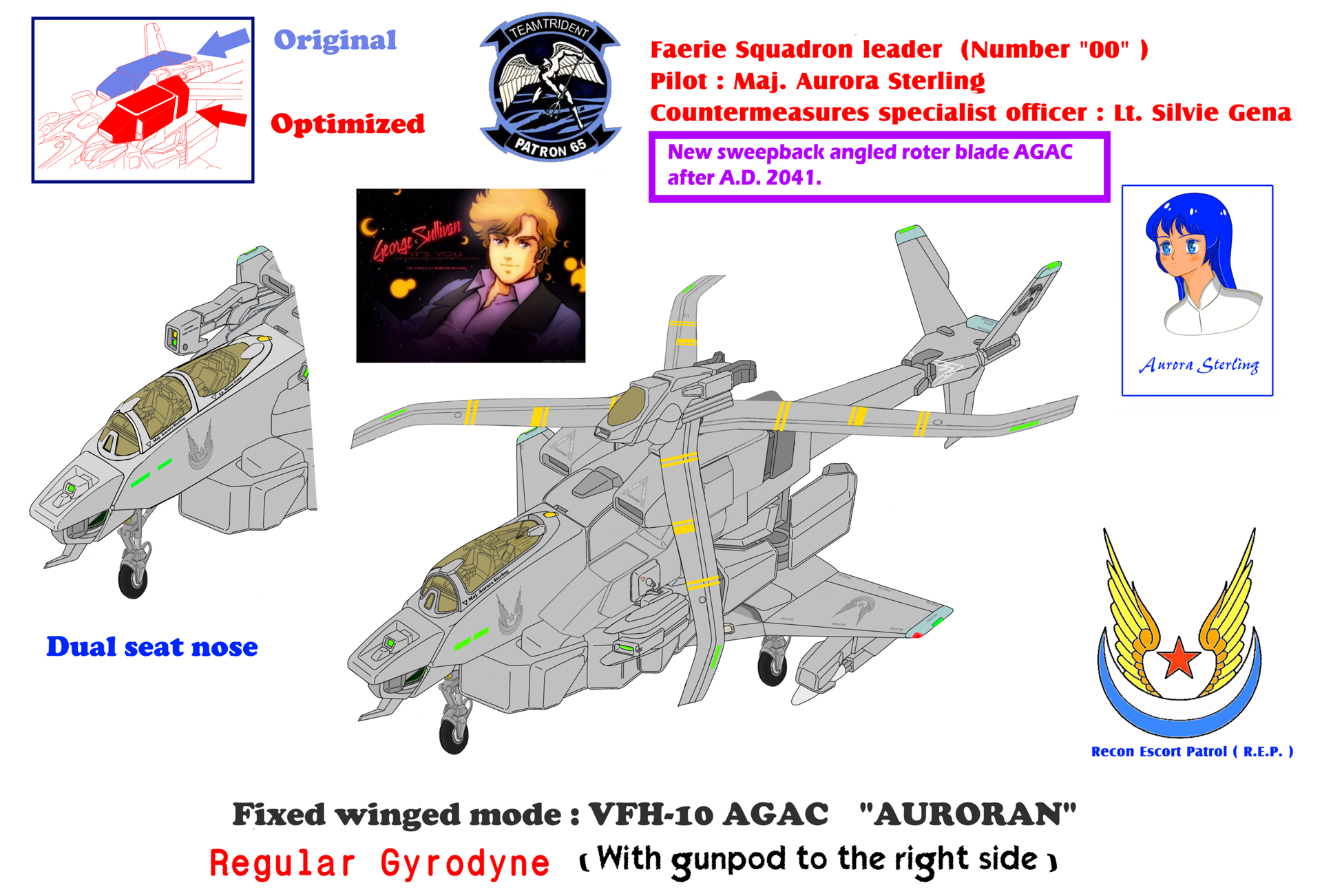
- スイベル支点によるセンサーポッド滑動移動機構を利用して両下腕を外側に90度回転させ、センサーと探照灯〔サーチライト〕を下腕の上から側面に移動させたのが「正規ジャイロダイン」の可変戦闘機 VFH-10C/G 「オーロラン」です。
スイベル(Swivel)は2つの接続点を持って互いに自由に回転できるようにした接続部、又は接続部品である。
- 一般的な設計のスイベルでは、支持構造中の円筒形の棒が自由に回転できるように取り付けられている。棒は通常、ナットや座金、または棒が太くなっていることで外に出ないようになっている。この仕掛けでは、外側の支持構造側と、棒の端側、または中央部に接続される。
- 別の一般的な設計では、支持構造中の球が回転できるものである。この仕掛けでは外側の支持構造側と、内部の球に接続される。
- 3つ目の設計は、内部に空洞を持つ円筒形の棒の中に、その空間の直径より少しだけ小さな棒を持つものである。この仕掛けでは両端に接続される。