OpenCV::射影幾何学
最終更新:
![]() mikk_ni3_92 2008年10月24日(金) 11:17:37履歴
mikk_ni3_92 2008年10月24日(金) 11:17:37履歴
現在地 >> メニュー >> サンプルコード::OpenCV >> OpenCV::射影幾何学
関連:OpenCV::ホモグラフィ
射影幾何学
「ワールド座標系(X,Y,Z)」の点Pを「スクリーン座標系(x,y)」に対応させる事を
「投影変換(Projective Transform)」という。
一般に幾何変換をする時、同次座標(homogeneous座標)を使うと便利である。
つまり、
※ワールド座標系P(X,Y,Z)、スクリーン座標系p(x,y)、カメラの内部パラメータ行列M(3×3)とすると
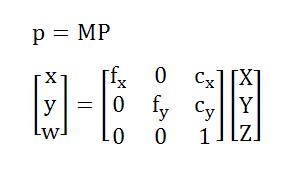
とまとまる(らしい)。(関連リンクHeikkila)
OpenCVでは、現在の座標の次元を1つあげる関数がある。
追加された次元には、「1」が設定される。
[例]:5つの点の2D座標を3D座標にあげる
メモ
次元変換は、
関連:OpenCV::ホモグラフィ
射影幾何学 
「ワールド座標系(X,Y,Z)」の点Pを「スクリーン座標系(x,y)」に対応させる事を
「投影変換(Projective Transform)」という。
一般に幾何変換をする時、同次座標(homogeneous座標)を使うと便利である。
つまり、
- (x,y)→(x,y,w)
- (x,y,z)→(x,y,z,w)
※ワールド座標系P(X,Y,Z)、スクリーン座標系p(x,y)、カメラの内部パラメータ行列M(3×3)とすると
とまとまる(らしい)。(関連リンクHeikkila)
OpenCVでは、現在の座標の次元を1つあげる関数がある。
追加された次元には、「1」が設定される。
[例]:5つの点の2D座標を3D座標にあげる
#include <iostream>
#include <cv.h>
#include <highgui.h>
//------------ 2D座標 -------------//
double CoordIn[5][2]={
{100,100},
{50,50},
{200,200},
{400,400},
{30,30}
};
const int N = 5;//(5点)
//----------- ここからメイン関数 ---------------//
int main(int argc, char *argv[])
{
CvMat *Pin = cvCreateMat(N,2,CV_64FC1);
cvSetData(Pin,CoordIn,Pin->step);
CvMat *Pout = cvCreateMat(N,3,CV_64FC1);
cvConvertPointsHomogeneous(Pin,Pout);//変換
for(int y = 0; y < N;++y){
for(int x = 0; x < 3;++x)
{
std::cout << CV_MAT_ELEM(*Pout,double,y,x) << " ";
}
std::cout << "\n";
}
cvReleaseMat(&Pin);
cvReleaseMat(&Pout);
return EXIT_SUCCESS;
}
メモ
次元変換は、
- 「1次元上げる」、
- 「そのまま」、
- 「1次元下げる」

