
Logging Model Train サーボドライバーデコーダー レポート 5 
SDD取付けレポート :おも
動作、初期設定など大まかな確認ができたので実際にモジュールにSDDをセットして運用状況を確認してみたいと思います。
セットするのは30mm枠のOnホイホイのすれ違いモジュール。線路の下に余裕のある30mmモジュールでテストします。
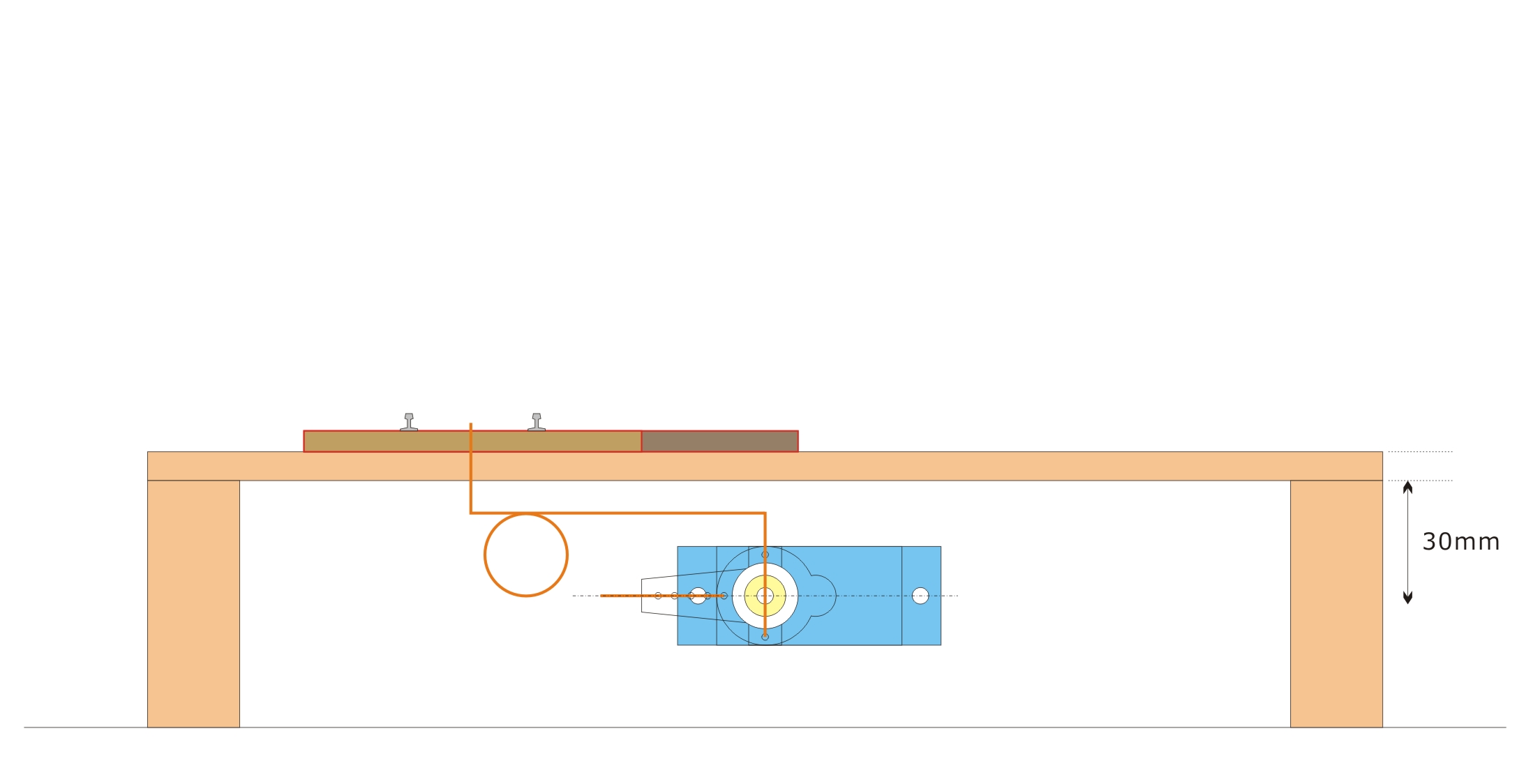
図面の白い部分が大き過ぎましたね^^;
これまでのテストを踏まえて、作用腕から先端レールまでの間にバネを入れることにしました。
電源投入時のセンタリング動作もこのバネで吸収できると思うのですが、机上ではここまで。
ゆるゆる作業していきます。
2011/6/1 おも
モジュールに組み込み
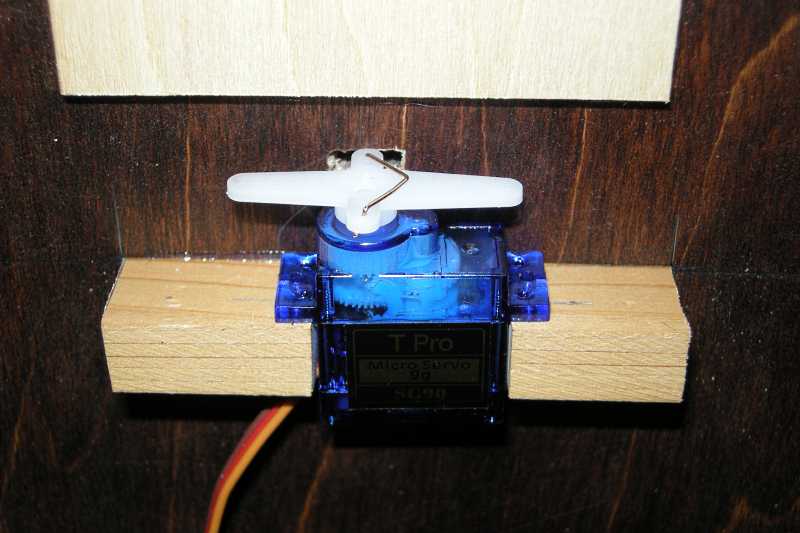
サーボは10x15mmの角材に付属の木ネジで取付ました。
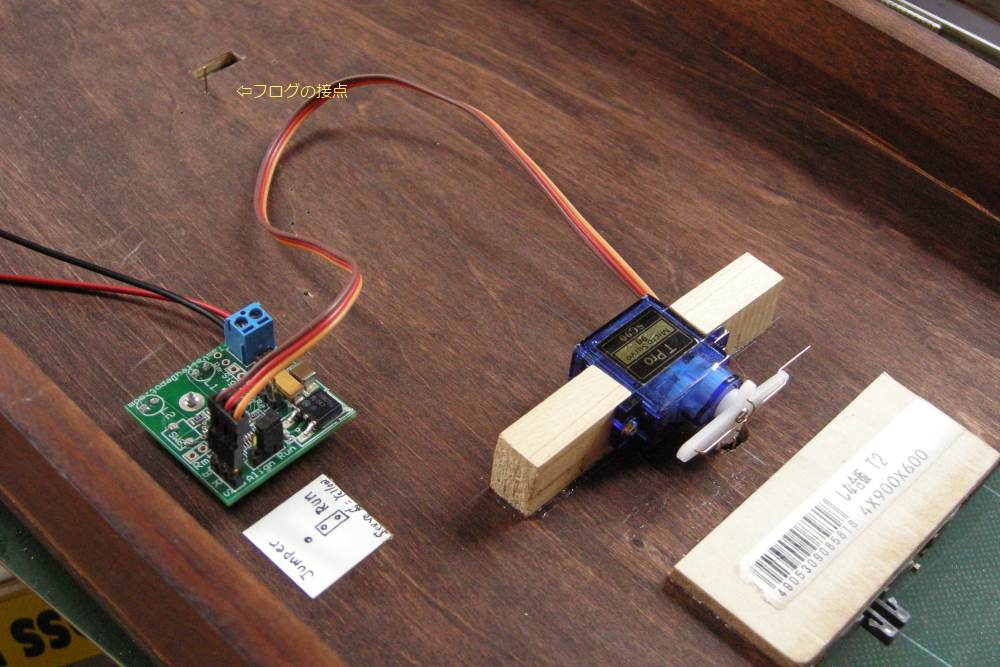
基板はモジュール表面からボタン操作できるような位置に取付。
裏面はシンプルですね。
ちらっと「フログの接点」という文字がありますが、フログへは作用腕に付けた接点で電気を送ろうかと思ってます。(未着手)
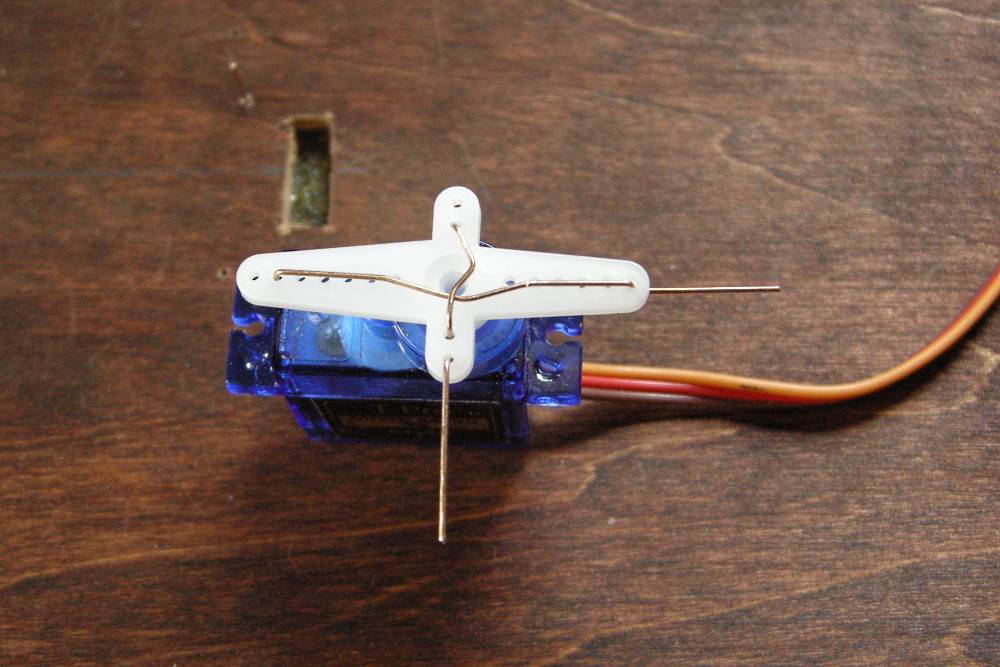
短い方の腕がポイントの動作用、長い腕から出た隣青銅線にフログからのコードを接続して、左右レールの接点に触れるようにしようと企んでます。
接触不良とかありそうだけどね。。
気になっていた電源投入時の初期動作は隣青銅線がバネになって吸収してくれました。
上面はこうなってます。

LEDとボタンは土に埋もれないように何かで囲わないといけませんね。
2つ目、取付時の注意点など。
すれ違いモジュールの反対側も続けて作成中です。
設置方法も同じなのでちょっと細かくレポートしますね。
まずはアームと作用部分



左から右へ作業してます。
腕から出る作用部分のアームはちょっと長めにするとセットしやすいようです。
台枠下からアームを入れて先端レールのタイに通ったら所定の位置にサーボをネジ止めします。

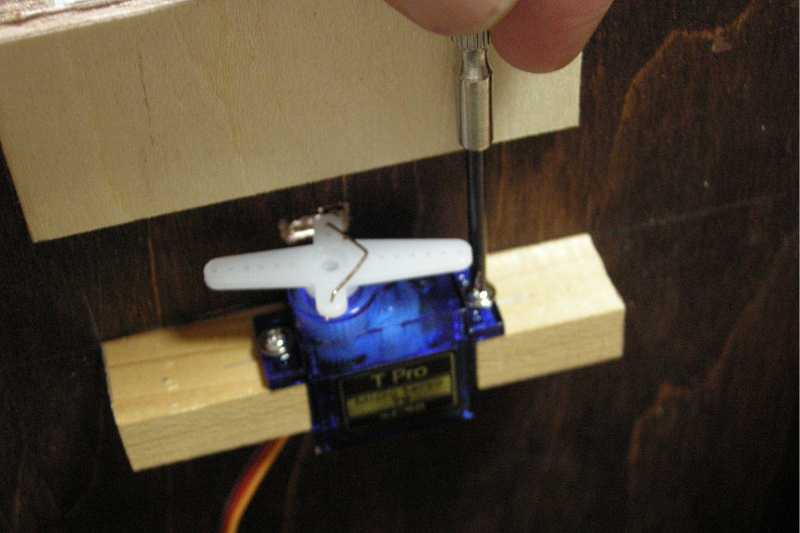
長すぎるアームはセットした後でカットします。
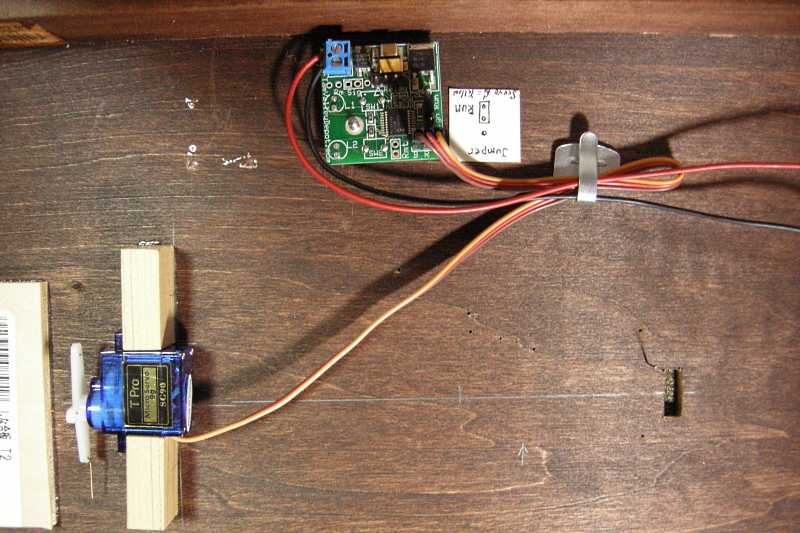
サーボを基板に接続。リードの向きを間違えないように覚えのために画像を貼っときます。

「B R S」と基板に印字されています。Sがオレンジです。(一番明るい色がこちらとのことです)
余ったケーブルが邪魔になるので100均で仕入れたケーブル留めでまとめました。
- 注意点
今回もサーボをセットして原点出しを行いましたが、バネが効きすぎたというか柔らか過ぎたようで、サーボが原点を掴めずいつまでもジージーと呻ってます。
何度かやり直しても同じだったので、サーボを一旦外し、フリーの状態で初期動作をさせました。
サーボの初期動作ではかなり強い力で限界点を探すので、バネが柔らかいと必要以上に動いてしまうようです。
そこで、原点出しは設置前に行なったほうがよさそうです。
また、原点はセットした後で変えられるのでフリー状態での原点出しはかなりいい加減でも大丈夫です。
今回は、フリー状態で原点を探り始めたらすぐに爪などで押さえて狭い範囲でしか動かない状態にして設置しました。
袋から取り出したら動作チェックも兼ねてすぐに原点出しをするのが賢明なようです。
◆Homeに戻る






最新コメント
2014-11-17
2011-04-26
2011-04-25
2010-09-16