
ステッピングモーター 
ステッピングモーターはパルスに同期して回転するモーターで、位置決めなどに用いられるモーターである。
パルスによって動くため、パルスモーターとも言われている。
英語ではStepperMotor(ステッパーモーター)と記載されている。

バイポーラタイプとユニポーラタイプがあり、Reprapではバイポーラタイプを使用している。
ホールディングトルクは13.7N-cm以上を推奨している。
モーターのサイズはNEMA14もしくはNEMA17。
NEMA14のほうが小型である。
入手先
秋月電子 ステッピングモーターSM−42BYG011
ボントン SANYO DENKI ステッピングモーター 103H5208-0241
Kysan 1124090 Nema 17 Stepper Motor(英語)
その他の入手先については公式wikiを参照。
パルスによって動くため、パルスモーターとも言われている。
英語ではStepperMotor(ステッパーモーター)と記載されている。

バイポーラタイプとユニポーラタイプがあり、Reprapではバイポーラタイプを使用している。
ホールディングトルクは13.7N-cm以上を推奨している。
モーターのサイズはNEMA14もしくはNEMA17。
NEMA14のほうが小型である。
入手先
秋月電子 ステッピングモーターSM−42BYG011
ボントン SANYO DENKI ステッピングモーター 103H5208-0241
Kysan 1124090 Nema 17 Stepper Motor(英語)
その他の入手先については公式wikiを参照。
SM−42BYG011
今回秋月電子で購入したSM-42BYG011というバイポーラタイプのステッピングモーターを使用した。
配線の順番は以下の写真の通り。

配線の順番は以下の写真の通り。
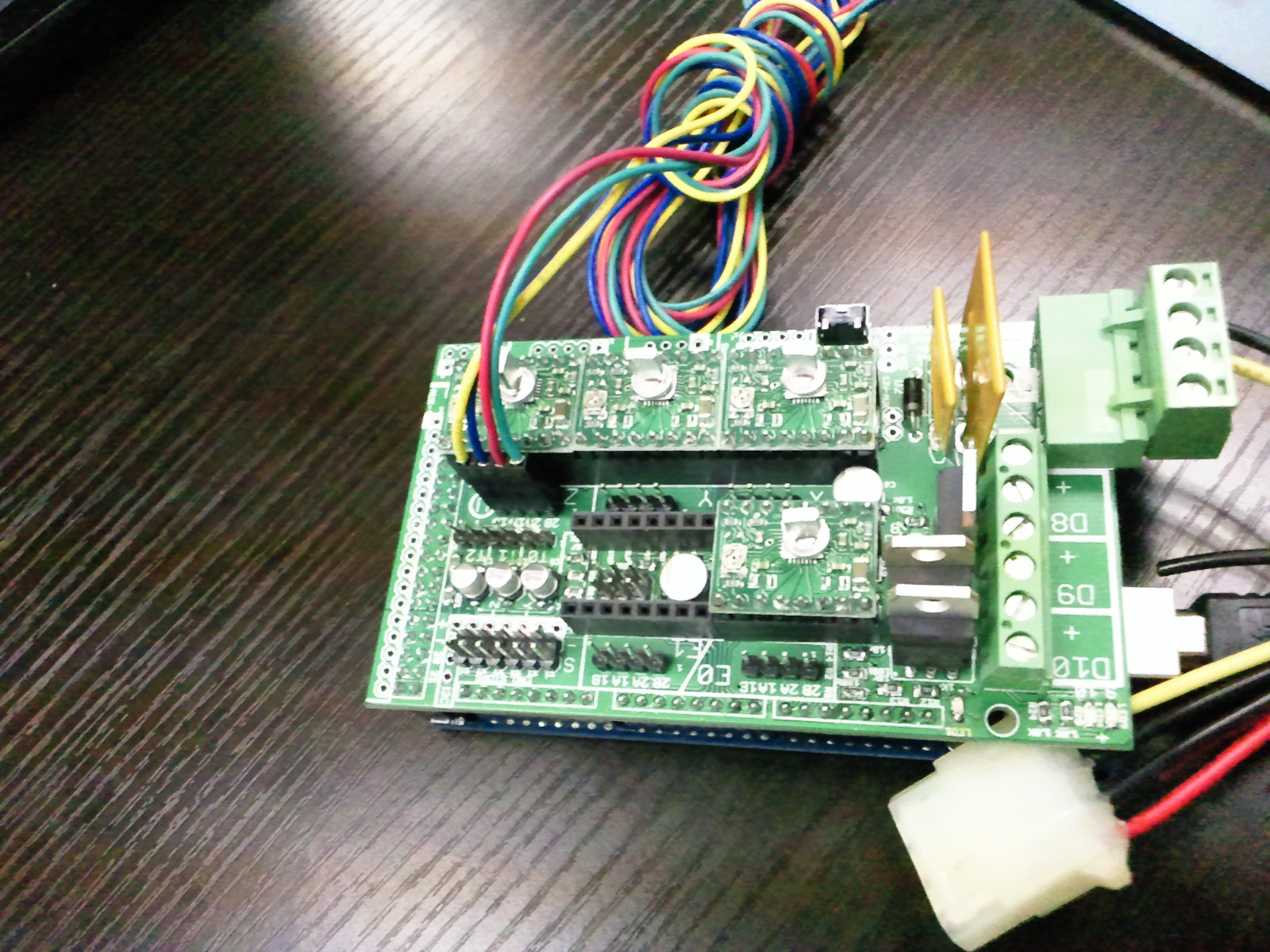
ステッピングモータードライバー
ステッピングモーターを制御するために必要なドライバー。
RAMPSに装着して使用するため、どれでもいいというわけではない。
ステッピングモータードライバA4988

RAMPSに装着可能なドライバーはこれのみである。
入手先
スイッチサイエンス ステッピングモータードライバA4988
Pololu Robotics and Electronics A4988 Stepper Motor Driver Carrier
スイッチサイエンスで入手した場合はピンヘッダーが付属されている。
Pololuは不明。
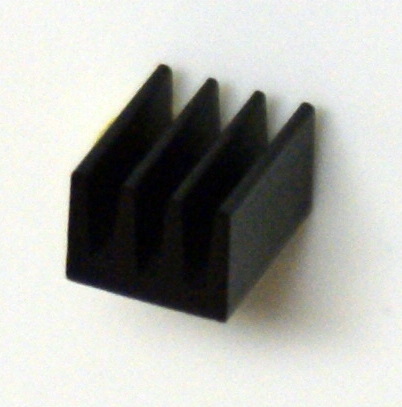
ステッピングモータードライバーは発熱が大きいため、ヒートシンクの設置を推奨している。
ヒートシンク無で駆動させた場合、最悪ドライバーが壊れるという情報が出ている。
しかし大きさが5mm角程度と非常に小さいため入手が困難となっている。
自作ヒートシンク
平頭のアルミリベットをつぶすことでヒートシンクとして代用。
以下の写真のサイズは頭径がφ5.5でちょうどいい大きさとなる。

未確認情報、使用注意
ヒートシンクの入手先

Heat Sink 6.3mm X 4.8mm

EnzoTech MOS-C1 小型Mosfetヒートシンク 10個セット
RAMPSに装着して使用するため、どれでもいいというわけではない。
ステッピングモータードライバA4988

RAMPSに装着可能なドライバーはこれのみである。
入手先
スイッチサイエンス ステッピングモータードライバA4988
Pololu Robotics and Electronics A4988 Stepper Motor Driver Carrier
スイッチサイエンスで入手した場合はピンヘッダーが付属されている。
Pololuは不明。
ステッピングモータードライバーは発熱が大きいため、ヒートシンクの設置を推奨している。
ヒートシンク無で駆動させた場合、最悪ドライバーが壊れるという情報が出ている。
しかし大きさが5mm角程度と非常に小さいため入手が困難となっている。
自作ヒートシンク
平頭のアルミリベットをつぶすことでヒートシンクとして代用。
以下の写真のサイズは頭径がφ5.5でちょうどいい大きさとなる。

未確認情報、使用注意
ヒートシンクの入手先
Heat Sink 6.3mm X 4.8mm

EnzoTech MOS-C1 小型Mosfetヒートシンク 10個セット
最新コメント
2014-02-03
2014-01-23
2014-01-22
2013-12-18
2013-11-20
2013-11-14