磁気/加速度センサーで方位角/傾きを検出する
最終更新:
 moonlight_aska 2013年06月01日(土) 23:31:15履歴
moonlight_aska 2013年06月01日(土) 23:31:15履歴
方位角や傾きを求めるのにSensor.TYPE_ORIENTATIONを使用していたが, API Level 8で非推奨になったようである.
そこで, Sensor.TYPE_MAGNETIC_FIELDとSensor.TYPE_ACCELEROMETERを使用して, 方位角と傾きを検出する.
方位角/傾きの検出
TYPE_ORIENTATIONとは回転角の符号が反対となったので, 調査が必要.
そこで, Sensor.TYPE_MAGNETIC_FIELDとSensor.TYPE_ACCELEROMETERを使用して, 方位角と傾きを検出する.
方位角/傾きの検出 
- Sensor06.java
- 各種センサーの使い方は, それぞれを参照.
- SensorManager#getRotationMatrixメソッドで, 加速度センサーと地磁気センサーの値から回転行列を求める.
- SensorManager#remapCoordinateSystemメソッドで, 端末の画面設定に合わせる変換行列を求める.
- SensorManager#getOrientationメソッドで, 方位角及び傾きを求める.
package com.moonlight_aska.android.sensor06;
import android.app.Activity;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
public class Sensor06 extends Activity implements SensorEventListener {
private SensorManager manager;
private TextView values;
// 回転行列
private static final int MATRIX_SIZE = 16;
float[] inR = new float[MATRIX_SIZE];
float[] outR = new float[MATRIX_SIZE];
float[] I = new float[MATRIX_SIZE];
// センサー値
private static final int AXIS_NUM = 3;
float[] gravity = new float[AXIS_NUM];
float[] geomagnetic = new float[AXIS_NUM];
float[] orientation = new float[AXIS_NUM];
float[] attitude = new float[AXIS_NUM];
/** Called when the activity is first created. */
@Override
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.main);
values = (TextView)findViewById(R.id.value_id);
manager = (SensorManager)getSystemService(SENSOR_SERVICE);
}
@Override
protected void onStop() {
// TODO Auto-generated method stub
super.onStop();
// Listenerの登録解除
manager.unregisterListener(this);
}
@Override
protected void onResume() {
// TODO Auto-generated method stub
super.onResume();
// Listenerの登録
manager.registerListener(this,
manager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),
SensorManager.SENSOR_DELAY_UI);
manager.registerListener(this,
manager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),
SensorManager.SENSOR_DELAY_UI);
manager.registerListener(this,
manager.getDefaultSensor(Sensor.TYPE_ORIENTATION),
SensorManager.SENSOR_DELAY_UI);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// TODO Auto-generated method stub
}
@Override
public void onSensorChanged(SensorEvent event) {
// TODO Auto-generated method stub
String str = "";
switch(event.sensor.getType()) {
case Sensor.TYPE_ACCELEROMETER:
gravity = event.values.clone();
break;
case Sensor.TYPE_MAGNETIC_FIELD:
geomagnetic = event.values.clone();
break;
case Sensor.TYPE_ORIENTATION:
orientation = event.values.clone();
break;
}
if (gravity != null && geomagnetic != null && orientation != null) {
// 回転行列を計算
SensorManager.getRotationMatrix(inR, I, gravity, geomagnetic);
// 端末の画面設定に合わせる(以下は, 縦表示で画面を上にした場合)
SensorManager.remapCoordinateSystem(inR, SensorManager.AXIS_X, SensorManager.AXIS_Y, outR);
// 方位角/傾きを取得
SensorManager.getOrientation(outR, attitude);
str = "1) 地磁気+加速度センサー"
+ "\n 方位角: " + String.format("%3.1f", Math.toDegrees(attitude[0]))
+ "\n 傾斜角: " + String.format("%3.1f", Math.toDegrees(attitude[1]))
+ "\n 回転角: " + String.format("%3.1f", Math.toDegrees(attitude[2]))
+ "\n\n2) 傾きセンサー"
+ "\n 方位角: " + String.format("%3.1f", (orientation[0] > 180.0 ? orientation[0]-360.0 : orientation[0]))
+ "\n 傾斜角: " + String.format("%3.1f", orientation[1])
+ "\n 回転角: " + String.format("%3.1f", orientation[2]);
values.setText(str);
}
}
}
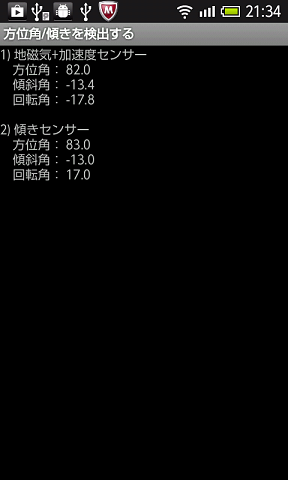
- 動作例
TYPE_ORIENTATIONとは回転角の符号が反対となったので, 調査が必要.

コメントをかく