�ץ����֤λȤ���
�ǽ�������
![]() quote_mraz 2022ǯ11��11��(��) 22:53:36����
quote_mraz 2022ǯ11��11��(��) 22:53:36����
�ץ����֥�����ʡ��ε�ư 
�ȣգġ�Head-Up Display�ˤκ�¦�Υܥ��鵯ư���ޤ���������ʡ��Υܥ�������ߡ���¦���ץ����֥�����ʡ������ޤ���


�ץ����ӥ�����ư�������
õ���Υץ���������ư��ˤ��Ƥߤޤ���������ꥢ����������ȥߥå����ʣ���Ϣ�ߥå����ˤ�õ���Ȥʤ��Ƥ���ȥץ����֤ȥ����㡼���餦���Ȥ��Ǥ���Τǡ��ޡ����åȤǥ⥸�塼����㤦��֤��ʤ��ޤ���
�������̡������侩��
����Υ����ͥ����������ꤹ����ˡ�ˤĤ��Ƥ������ͥ���ζ���Ƚ��ˡ������ޤ���������ϸ��߷������Ȥ�����Ƥ���Τǡ���ʬ�Υ�������٤ˤ��ǡ�������̤˼�äƤ�����ƻ�ʺ�Ȥ�ɬ�פˤʤ�ޤ����������Τ��̤�Τǡ��ץ�õ���Ȥϻ�ƤߤƤ�褤�Ǥ��礦��
���ץ����֥�����ʡ��Σգ�

�����ϥܥ���
�����ȱ�����֤�Ÿ�������ץ����֥����㡼�����ϤϤ��ޤ���
���ԥ�ݥ���ȥե���������Ǽͽ�
�ץ����֤�̩���������ǥե���ȤΥե��������ԥ�ݥ���ȥե���������ǥץ����֤�ͽФ��ޤ���
��������ǽ�ϰϤ����ʤäƤ�����̩�����Ƥ���Τǡ��Ǹ�εͤ�������Ǥ���
����Ÿ����ץ����֤�������ϡ��ԥ�ݥ���ȥե������������ޤ���
�ǥե���ȥ�������ϰϤ����ʣ����աˤʤΤǡ���������ϰϤ�ʤ����Ǥ��ޤä������᤹�Ȥ��ʤɤˤ���Ω���ޤ���
��������ǽ�ϰϤ����ʤäƤ�����̩�����Ƥ���Τǡ��Ǹ�εͤ�������Ǥ���
����Ÿ����ץ����֤�������ϡ��ԥ�ݥ���ȥե������������ޤ���
�ǥե���ȥ�������ϰϤ����ʣ����աˤʤΤǡ���������ϰϤ�ʤ����Ǥ��ޤä������᤹�Ȥ��ʤɤˤ���Ω���ޤ���
�����ץ�åɥե���������Ǽͽ�
����¸�����ե����������Ÿ��
�������ष���ե���������ǥץ����֤�Ÿ�����ޤ�����������Ԥ��ˤϡ����餫����ץ����֤����֤���¸���Ƥ���ɬ�פ�����ޤ���
��¸��Ÿ����ξ��֤���¸���ޤ����ޤ��ϥץ����֤�Ф���Ǥ�դ����֤��ϰϤ����ꤷ�Ƥ������������ξ��֤ǡ��ʲ��Τ褦�ˡ��ܥ���˥�����������Ƥ����֤ǽФ��å�������å����ޤ���
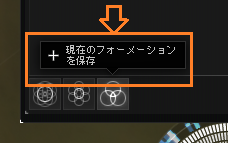
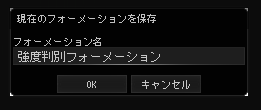
̾����Ĥ��ƥե������������¸���ޤ�����¸�����ե���������ϥܥ��������Ʊ���褦�˥ܥ���˥�����������Ƥ��Ȥ��˽Ф�̾�Τ��鵯ư���ޤ���
ʣ���Υե�����������¸����Ƥ�����ϡ��ɤ줫���Ĥ�������֡ʶ�Ĵɽ�����֡��ˤʤäƤ��ޤ����ܥ�������Ȥ���Ÿ�������ե���������Ĵ����Ƥ��ޤ���
̾�Τ�����Ÿ��������硢���Υե���������������֡ʶ�Ĵɽ�����֡��ˤʤꡢ����ʹߥܥ�������Ȥ���Ÿ�������ե���������ˤʤ�ޤ����ե����������̾�Τβ��ˤ�Ÿ������Ƥ���ץ����֤ο������ܤ���Ƥ��ꡢ�ץ����֥����㡼�ˤ��ο��Υץ����֤���Ŷ����Ƥ��ʤ�����Ÿ����ǽ�ˤʤ�ޤ���
�ץ����֤ΰ��֤䥹������ϰϤ���̤����������ϡ��������Ȥ��Ƥ���������
��¸��Ÿ����ξ��֤���¸���ޤ����ޤ��ϥץ����֤�Ф���Ǥ�դ����֤��ϰϤ����ꤷ�Ƥ������������ξ��֤ǡ��ʲ��Τ褦�ˡ��ܥ���˥�����������Ƥ����֤ǽФ��å�������å����ޤ���
̾����Ĥ��ƥե������������¸���ޤ�����¸�����ե���������ϥܥ��������Ʊ���褦�˥ܥ���˥�����������Ƥ��Ȥ��˽Ф�̾�Τ��鵯ư���ޤ���
ʣ���Υե�����������¸����Ƥ�����ϡ��ɤ줫���Ĥ�������֡ʶ�Ĵɽ�����֡��ˤʤäƤ��ޤ����ܥ�������Ȥ���Ÿ�������ե���������Ĵ����Ƥ��ޤ���
̾�Τ�����Ÿ��������硢���Υե���������������֡ʶ�Ĵɽ�����֡��ˤʤꡢ����ʹߥܥ�������Ȥ���Ÿ�������ե���������ˤʤ�ޤ����ե����������̾�Τβ��ˤ�Ÿ������Ƥ���ץ����֤ο������ܤ���Ƥ��ꡢ�ץ����֥����㡼�ˤ��ο��Υץ����֤���Ŷ����Ƥ��ʤ�����Ÿ����ǽ�ˤʤ�ޤ���
�ץ����֤ΰ��֤䥹������ϰϤ���̤����������ϡ��������Ȥ��Ƥ���������
����ư��Υץ����֤���
������֤�Ÿ����Υץ����֤����ۡ���ɤ˲�����ޤ��������㡼�˥�����ɤϤ��Ƥ���ʤ��Τǡ�������ϼ�ư�ǹԤ�ɬ�פ�����ޤ���
���ץ����֤Υ�������ϰϤ����ѹ�
�ץ����֤Υ�������ϰϤ��ѹ����ޤ����Ť����ͤ��ȥץ����֤Υ�������ϰϤε��Ĥ�������Ƥ��ޤ���������������ϤǤ��ޤ���Τ����դ��Ƥ�����������������ϰ��ѹ��Ϥ����Ǥ����ΤߤȤʤ�ޤ���
�Ĥޤߤ�ɥ�å�����ư������������������Ƥƥ���������ܥ�������롢�ޤ��ϤĤޤߤκ�����å����롢�ʤɤ�ư��ǥ��������ѹ���ǽ�Ǥ���
�ץ����֤Υ�������ϰϤ������ʤ�ȡ�����ʬ�ϰ������̩��Ĵ���Ǥ���Ȥ������Ȥˤʤꡢ�¼�Ū�ʥ�������٤����ä��ޤ�����������ϰϤ������ʤ�ʬ���ϰϳ��ˤʤ��ǽ����⤯�ʤ�ޤ������ޤ�����ʤ�ʤ����ϰϤ�Ƥ����Τ��ץ����֥������δ���Ū�ʥץ������ˤʤ�ޤ���
�Ĥޤߤ�ɥ�å�����ư������������������Ƥƥ���������ܥ�������롢�ޤ��ϤĤޤߤκ�����å����롢�ʤɤ�ư��ǥ��������ѹ���ǽ�Ǥ���
�ץ����֤Υ�������ϰϤ������ʤ�ȡ�����ʬ�ϰ������̩��Ĵ���Ǥ���Ȥ������Ȥˤʤꡢ�¼�Ū�ʥ�������٤����ä��ޤ�����������ϰϤ������ʤ�ʬ���ϰϳ��ˤʤ��ǽ����⤯�ʤ�ޤ������ޤ�����ʤ�ʤ����ϰϤ�Ƥ����Τ��ץ����֥������δ���Ū�ʥץ������ˤʤ�ޤ���
���ץ����֤Υ��ơ�����
�̾��Ÿ����Υץ����ֿ���ɽ������Ƥ��ޤ���������������Ƥ�ȡ�������֤�Ÿ�����Ƥ���ץ����֤�̾�ΤȾ��֤�ɽ������ޤ���
�ץ����֤�����ҹԻ����Ȥ������ơ�����������ޤ�������Ϥ��ʤ����������֤ؤ�Ÿ����ǽ���֤Ǥ���
�ץ����֤˥�����������Ƥ�ȻĤ�ҹԻ��֤��ǧ���뤳�Ȥ��Ǥ��ޤ���
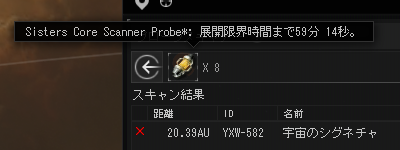
����ҹԻ��֤����ȥץ����֤ϼ����ޤ���
�ץ����֤�����ҹԻ����Ȥ������ơ�����������ޤ�������Ϥ��ʤ����������֤ؤ�Ÿ����ǽ���֤Ǥ���
| ���� | ����ҹԻ��֡��á� | ����ҹԻ��֡ʻ��֡�ʬ���á� |
| ����������ʡ��ץ����֭���Core Scanner Probe I�� | 4000 �� | �����֣�ʬ������ |
| ��Ʈ������ʡ��ץ����֭���Combat Scanner Probe I�� | ||
| ������������������ʡ��ץ����֡�Sisters Core Scanner Probe�� | ||
| ����������Ʈ������ʡ��ץ����֡�Sisters Combat Scanner Probe�� | ||
| RSS����������ʡ��ץ����֡�RSS Core Scanner Probe�� | 1000 �� | ����ʬ������ |
�ץ����֤˥�����������Ƥ�ȻĤ�ҹԻ��֤��ǧ���뤳�Ȥ��Ǥ��ޤ���
����ҹԻ��֤����ȥץ����֤ϼ����ޤ���
���ץ����֤���ǽ
Ÿ����Υץ����֤���ǽ��ɽ������ޤ�������������������������������������������ȤʤäƤ��ޤ��������ϥ����뤬�û�����Ƥ��ꡢ������������Ƥ�Ȥ��������Ȥ��뤳�Ȥ��Ǥ��ޤ���
���������¸�ߤ��륷���ͥ���
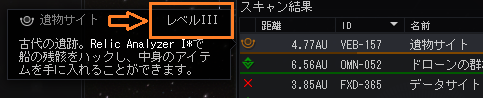
�����ͥ��㤬����Υ��ID��̾���ʤɤǼ��̤Ǥ���褦�ˤʤäƤ��ޤ��������ʥ��̤������֤Ǥ�0.0%�ǡ����������ꤹ���100.0%�ˤʤ�ޤ���
��������ϥ������Ǥ�ɽ������ޤ�����������䥲�����ο��ϡ������顼�����ƥ�ޥåפ�ɽ�������ɽ���ο����б����Ƥ��ޤ���
25%�ʾ����������ˤʤ�ȡ����������٤��狼��ޤ��������Υ����ͥ���˥�����������Ƥ�ȡ���Ф���ɽ������ޤ���
�и��ǥ�������ǽ������٤��Ϥ�Ǥ���������
��������ϥ������Ǥ�ɽ������ޤ�����������䥲�����ο��ϡ������顼�����ƥ�ޥåפ�ɽ�������ɽ���ο����б����Ƥ��ޤ���
| 0.0 %������24.9 % | ����Υ����ͥ����̤������֤Υ����ͥ���� |
 | |
| 25.0 %������74.9 % | �����Ȥμ��ब���ꤵ�줿���� |
 | |
| 75.0 %������99.9 % | �����Ȥ�̾�Τ����ꤵ�줿���� |
 | |
| 100.0 % | ���֤����ꤵ�줿���֡ʥ�ײ�ǽ�� |
 | |
25%�ʾ����������ˤʤ�ȡ����������٤��狼��ޤ��������Υ����ͥ���˥�����������Ƥ�ȡ���Ф���ɽ������ޤ���
�и��ǥ�������ǽ������٤��Ϥ�Ǥ���������
�������顼�����ƥ�ޥå�
�����ϤΥ����顼�����ƥ�����۷ϡˤΥޥåפ�ɽ�����ޤ����ޥå���ˤ������䥹���������ȡ����ơ������ʤɤ�¾�������ͥ���˴�Ϣ����ɽ�����ɲä���ޤ���

�����ͥ��������ѤߤΥ����Ȥϼ���˹�碌�����������ɽ������ޤ���
�������꤬��ʬ�Ǥʤ������ͥ���ϡ����ʤ��ߥޡ����ˤʤ�ޤ���
�����ͥ������������٤ˤ�äƤϡߤΤޤ����Ѥ�뤳�Ȥ⤢��ޤ���

�����ͥ��㤬���İʾ�Υץ����֤����ꤵ��Ƥ�����ϡ�����˹�碌����������ɽ������ޤ���
�����Х����ȤϾ�˥�ײ�ǽ�ʥ����ȤȤ���ɽ������롣
�����ͥ������֥륯��å�����������ޥåפ������ɽ������ޤ����ޥåפ��ž�������ꤹ��ݤ��濴�Ȥʤä�ư���ʤ��褦�ˤʤ�Τǡ��ץ����֤ʤɤ��碌�䤹���ʤ�ޤ����ޤ�����������Υ���������������μ��Ϥ�ɽ������ޤ���

�����ͥ��������ѤߤΥ����Ȥϼ���˹�碌�����������ɽ������ޤ���
�������꤬��ʬ�Ǥʤ������ͥ���ϡ����ʤ��ߥޡ����ˤʤ�ޤ���
 | �����ͥ��㤬����̤���Υץ����֤����ꤵ��Ƥ���� |
�����ͥ������������٤ˤ�äƤϡߤΤޤ����Ѥ�뤳�Ȥ⤢��ޤ���
�����ͥ��㤬���İʾ�Υץ����֤����ꤵ��Ƥ�����ϡ�����˹�碌����������ɽ������ޤ���
 | ���٤�����25%̤���� |
 | ��Ʈ������ |
 | ��ʪ������ |
 | �ǡ��������� |
 | ���������� |
 | �������� |
 | ���ۡ��� |
�����ͥ������֥륯��å�����������ޥåפ������ɽ������ޤ����ޥåפ��ž�������ꤹ��ݤ��濴�Ȥʤä�ư���ʤ��褦�ˤʤ�Τǡ��ץ����֤ʤɤ��碌�䤹���ʤ�ޤ����ޤ�����������Υ���������������μ��Ϥ�ɽ������ޤ���
�����з�̥ե��륿
�ǥե���ȤǤ����Ƥ����Ф��줿���֤Ǥ���������Υ����Ȥ�����������ꤷ�ʤ��Ƥ褤���⤢�ꤨ�ޤ��ʰ�ʪ���ʥ饤���������������Ƥ��ʤ��Τǥǡ��������Ȥ�̵�뤹�롢���������ʤΤǥ����ʳ�̵�뤹�롢���ۡ�������뵤���ʤ��Τ�̵�뤹�롢�ʤɡˡ�����ʤȤ��Ϥ����ǻ��ꤷ�ƥե��륿���ޤ���
�ºݤϡ���Ʈ������ʡ��ˤ�륹��������ꤹ���̣���Ȥ��ɥ�����Ȥ����ݸ¤ʤ��Ҥä����äƤ�������ѡˤ���Ρ��Ĥޤ�PvP�����ε�ǽ�Ǥ���

�פ��̤�Υե��륿��¸�ߤ��ʤ����ϡ���������ե��륿��������뤳�Ȥ�Ǥ��ޤ���õ�������Ȥ�ʬ��ʤɤϥǥե���ȤǤ�¸�ߤ��ʤ��Τǡ���������Ǻ������ޤ��礦��
���Ф�������Τ�����ꥹ�Ȥ�������Ŭ����̾����Ĥ�����¸���ƻ��Ѥ��ޤ���

�ºݤϡ���Ʈ������ʡ��ˤ�륹��������ꤹ���̣���Ȥ��ɥ�����Ȥ����ݸ¤ʤ��Ҥä����äƤ�������ѡˤ���Ρ��Ĥޤ�PvP�����ε�ǽ�Ǥ���
�פ��̤�Υե��륿��¸�ߤ��ʤ����ϡ���������ե��륿��������뤳�Ȥ�Ǥ��ޤ���õ�������Ȥ�ʬ��ʤɤϥǥե���ȤǤ�¸�ߤ��ʤ��Τǡ���������Ǻ������ޤ��礦��
���Ф�������Τ�����ꥹ�Ȥ�������Ŭ����̾����Ĥ�����¸���ƻ��Ѥ��ޤ���
����̤�̵��
�������줿��̤���å���̵�뤹��褦����������ȡ����Υꥹ�Ȥ�ɽ������ޤ���̵�뤹��Ȱ��Ū�˰�����ɽ������ʤ��ʤ�ޤ������������ϡ��ꥹ�Ȥκ�¦�ΥХİ��Dz�����ޤ���

�������顼�����ƥ�ޥåפȰ��β�
�ץ����֥��������ɥ����ƥ��֤ˤ��Ƥ���Ȥ��Τ�ɽ������뤳�Υܥ�����ȡ�������ɥ��������顼�����ƥ�ޥåפȰ��β����ޤ���������ɥ����Ťʤä��ꤷ�Ƥ��ɤ��������ˤ�������Ǥ���
�ץ����֤����ȥ��ơ�����
���
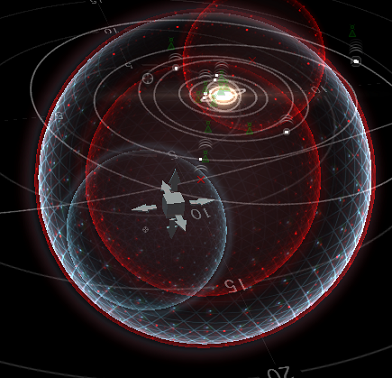
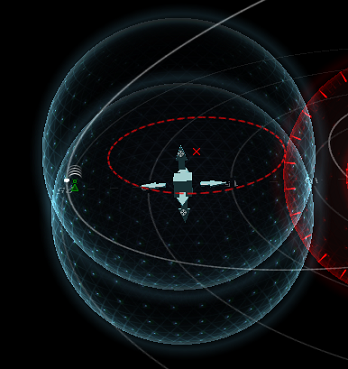
�ץ����֤�Ω���ΤȾ岼��������Σ�����������ǥޥå��ɽ������ޤ����ץ����֤��顼�����ƥ�ޥå�������ư����������硢���������������å������ޤ�ư�����ޤ��������������ư���������ǤϤʤ�������������Фˤʤ��ȿ��¦�Ρ�����������ˤ�ư�����ޤ���

Ʊ�ͤˡ������Ω���Τ��̤����Ǥ��ޤ��������̤�������å������ޤ�ư�����ޤ�������Ȥϰۤʤꡢ�������̤�ʿ�Ԥ������˼�ͳ�˰�ư�����뤳�Ȥ��Ǥ��ޤ���

Ʊ�ͤˡ������Ω���Τ��̤����Ǥ��ޤ��������̤�������å������ޤ�ư�����ޤ�������Ȥϰۤʤꡢ�������̤�ʿ�Ԥ������˼�ͳ�˰�ư�����뤳�Ȥ��Ǥ��ޤ���
�ץ����֤Υ��������
�ץ����֤ζ��٤ϡ������ͥ�������ꤹ�뤿�������β��������ѥ����Ǥ����⤱��й⤤�ۤɥ����ͥ�������ꤷ�䤹���ʤ�ޤ�����ˤϰ���ʾ�ζ��٤Ǥʤ���������ǽ�ʥ����ͥ����¸�ߤ��ޤ���
���ϥܥ�����٤ˤ���С��ǥץ�����1�Ĥ��ȤΥ�������ϰϤ����뤳�Ȥ��Ǥ�����������ϰϤ�̤�뤴�Ȥ˶��٤��ܤ������Ƥ����ޤ���


�ϰϤ�̤�뤳�ȤǸ��Ť餯�ʤä��顢�ޥåפ�������礷�Ƥ����ޤ���
���Τξ����֤����ˤ���Ф����顢�ץ����֤Υ����������˵����դ��ʤ��餦�ޤ��ԥ�ݥ���ȥ�����������ն������ª����褦�ˤ��ʤ����ϰϤ�̤�ƶ��٤����������Τʾ������ꤷ�Ƥ��������줬�ץ����֥������δ���Ū�ʥץ������ˤʤ�ޤ���
�ǽ�Ū�ˤ�1AU��0.5AU�ޤǽ̤�뤯�餤�ε������ǥ�����Ƥ����ޤ��礦��
���ϥܥ�����٤ˤ���С��ǥץ�����1�Ĥ��ȤΥ�������ϰϤ����뤳�Ȥ��Ǥ�����������ϰϤ�̤�뤴�Ȥ˶��٤��ܤ������Ƥ����ޤ���
�ϰϤ�̤�뤳�ȤǸ��Ť餯�ʤä��顢�ޥåפ�������礷�Ƥ����ޤ���
���Τξ����֤����ˤ���Ф����顢�ץ����֤Υ����������˵����դ��ʤ��餦�ޤ��ԥ�ݥ���ȥ�����������ն������ª����褦�ˤ��ʤ����ϰϤ�̤�ƶ��٤����������Τʾ������ꤷ�Ƥ��������줬�ץ����֥������δ���Ū�ʥץ������ˤʤ�ޤ���
�ǽ�Ū�ˤ�1AU��0.5AU�ޤǽ̤�뤯�餤�ε������ǥ�����Ƥ����ޤ��礦��
�ץ����֤Υ���������
���ϸ�˽ФƤ�������ߤ��ϡ��ץ����֤ˤ�ä�õ�Τ��줿�����ͥ���Τ����ޤ��ʰ������Ƥ��ޤ������Υ�������̤��ºݤΥ����ͥ���ΰ��֤���ɤ����Υ��Ƥ��뤫�Ȥ����Τ��ץ����֤θ����Ǥ����������礭���Ȥ������Ȥϡ�����ʬͽ�۰��֤����������Ȥ������ȤǤ��ꡢ��̤Ȥ��ƥ�������̡ʥ����ͥ����ͽ�۰��֡ˤ��礭��ư���褦�ˤʤ�ޤ���
�ºݤ˥��������Ȥ��ˡ��ϰϤ�ݤ˥�������ϰϤ���ºݤΥ����ͥ���ΰ��֤����˽ФƤ��ޤ�����������������Ȥ��ä��褦�ʻ���ȯ�����ޤ���
�դ˸�����������С��֤����ΰ��֤��Ф��������˥�������ϰϤ�̤ᡢ�쵤������˻��äƤ������Ȥ��Ǥ��ޤ��������뤬·��ʤ������ϡ��ץ����֤��ϰϤϣ��ʳ����IJ����ʤ��ȸ������㤷�������ӽФ��Ƥ��ޤ����Ȥ�¿������ޤ����������������٥����뤬·�äƤ���ȡ�2�ʳ������Ƥ�ޤ����ԤǤ��뤯�餤�ˤʤ�ޤ���
�ºݤ˥��������Ȥ��ˡ��ϰϤ�ݤ˥�������ϰϤ���ºݤΥ����ͥ���ΰ��֤����˽ФƤ��ޤ�����������������Ȥ��ä��褦�ʻ���ȯ�����ޤ���
�դ˸�����������С��֤����ΰ��֤��Ф��������˥�������ϰϤ�̤ᡢ�쵤������˻��äƤ������Ȥ��Ǥ��ޤ��������뤬·��ʤ������ϡ��ץ����֤��ϰϤϣ��ʳ����IJ����ʤ��ȸ������㤷�������ӽФ��Ƥ��ޤ����Ȥ�¿������ޤ����������������٥����뤬·�äƤ���ȡ�2�ʳ������Ƥ�ޤ����ԤǤ��뤯�餤�ˤʤ�ޤ���
�ץ����֤Υ���������
���������֤ϡ����ϥܥ�����Ƥ����̤��Ф�ޤǤλ��֤Ǥ������ä�������Ͼ夲���������夲�ޤ��礦��
õ�����ᤤ�Ծ����Ǥ����������ϰ�Ǥ�®�٤ϤȤ��˽��פˤʤäƤ��ޤ����ޤ�����Ʈ�ץ����֤��ݤ����˽��פǤ����Ȥꤢ��������������®�����®���ۤɤ褤�Ǥ���
õ�����ᤤ�Ծ����Ǥ����������ϰ�Ǥ�®�٤ϤȤ��˽��פˤʤäƤ��ޤ����ޤ�����Ʈ�ץ����֤��ݤ����˽��פǤ����Ȥꤢ��������������®�����®���ۤɤ褤�Ǥ���
�ץ����ӥμ��ȥƥ��˥å�
ư���ȥ�������Ĥ����Ȼפ��ޤ����������ϰϤǥ����ͥ����ʬ�Ϥ��������פȤ������Τΰ��֤����ꤹ���פȡ����ϰϤ�ʤ����ȶ��˥ץ����֤ζ��٤�夲�����Τʰ��֤����ꤹ���פ��֤��Ƥ����ޤ���
�ץ����֤�õ�η�̤ˤ�äƲ��β����Τ褦��ȿ������Τ������ҥ�Ȥ�������Ĥ��ư쵤�˹ʤ����Ǥ����Τ��ץ����ӥδ��ܤǤ������ʿ͡������뤬�⤤�ͤϼ�ݤ褯���ιʹ��ߤʤ��Ƥ����ޤ���
�ץ����ְ��֤���Ĵ��
CTRL�������ʤ���ޥ����Υ���������ܥ����ư�����ȡ��ץ�����Ʊ�Τε�Υ��Ĵ������ޤ���
�ץ����֤�Ʊ���Ȥ������������äƤ⤢�ޤ����Ω���ޤ������������Τˤ��뤿��ˤϡ��ץ����֤�Ŭ�٤ˡʽŤʤ���֤�¿��ɬ�פ�����Ŭ�٤ˡˤФ餱�Ƥ���ɬ�פ�����ޤ��Τǡ������Ŭ�٤˥ץ����֤δֳ֤���֤�Ĵ����������ˤ��뵡ǽ�Ǥ��뤳�Ȥ�ռ����Ƥ����ޤ��礦��
�ץ����֤�Ʊ���Ȥ������������äƤ⤢�ޤ����Ω���ޤ������������Τˤ��뤿��ˤϡ��ץ����֤�Ŭ�٤ˡʽŤʤ���֤�¿��ɬ�פ�����Ŭ�٤ˡˤФ餱�Ƥ���ɬ�פ�����ޤ��Τǡ������Ŭ�٤˥ץ����֤δֳ֤���֤�Ĵ����������ˤ��뵡ǽ�Ǥ��뤳�Ȥ�ռ����Ƥ����ޤ��礦��
����Τ���Υҥ��
�����顼�����ƥ�ޥå���Υ����ͥ���ϡ�ʬ�Ϸ�̤ˤ�äƤ����Ĥ���ɽ�����ޤ���
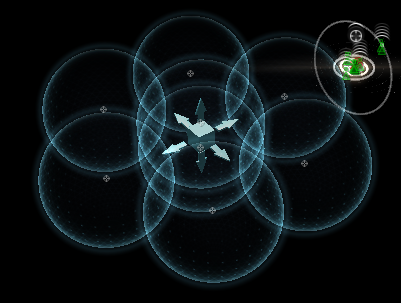
���ץ����֣��Ĥ�õ�Τ���Ƥ������
�ץ����֤Υ�������ϰϤ���ȽŤʤ�褦�ˡ��֤����Τ�ɽ������Ƥ��ޤ�������ϥץ����֣��Ĥǥ�������ϰ���˥����ͥ��㤬���뤳�Ȥ��ޤ�������ϤԤä���Ťʤ�ޤ��������ޥץ����֤������ͥ���˶ᤤ����˿��椬�������Ф��졢�֤��夬������ɽ������뤳�Ȥ�����ޤ���
���ε����Τ˥ԥ�ݥ���ȥե�������������ץ����֤֤���褦�˥�������쵤��ʣ���Υץ����֤����õ�η�̤����ƹʤ���ߤޤ���
���ץ����֣��Ĥ�õ�Τ���Ƥ������
�ץ����֤Υ�������ϰϤ����������˱ߤ�ɽ������ޤ�������ϣ��ĤΥץ����֤�Ʊ��ID�Υ����ͥ����õ�Τ��Ƥ�����֤Ǥ���
���ξ��ϡ��ߤε�ƻ��˥����ͥ��㤬��������ʤΤǡ��ߤ٤ƴޤ�褦�˥�������ϰϤ����ꤷ�ޤ��礦�����Ĥ�õ�Τ����궹���ϰϤǹʹ��ߤ���ǽ�Ǥ���
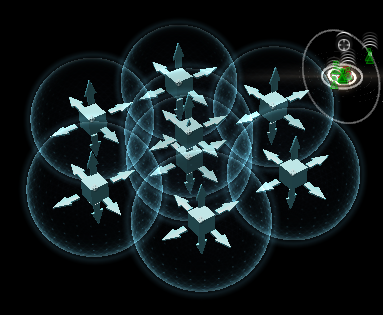
���ץ����֣��Ĥ�õ�Τ���Ƥ������
���ξ��ϣ��ĤΥץ����֤Υ�������ϰϤ����뤢�����������ɽ�����Фޤ���������Ʊ��ID����������ɽ������ޤ�������ϡ������ǷҤ��äƤ��ޤ���
���ξ���ɬ���ۤ�����ʪ�ʤΤǡ���������濴���碌�ƥץ����֤�̩�������ƺƥ�����ޤ��礦��
��''�ץ����֣��İʾ��õ�Τ���Ƥ������
���ξ�硢���İʾ�Υץ����֤ˤ�ä�õ�Τ���Ƥ����ϰ�����֤���������ɽ������ޤ��������ޤǤ����餢�Ȥϥ�������ϰϤ����տ����̤�Ƥ����С������ƺǽ�Ū�ʶ��٤���Ƥ��������ޤǻ��äƤ������Ȥ��Ǥ��ޤ���
�֤�����ץ����֤���߹���褦�����֤�ݻ�������������ϰϤ�Ƥ����ȿ��椬�ɤ�ɤ��ʤäƤ����ޤ���
���ץ����֣��Ĥ�õ�Τ���Ƥ������
�ץ����֤Υ�������ϰϤ���ȽŤʤ�褦�ˡ��֤����Τ�ɽ������Ƥ��ޤ�������ϥץ����֣��Ĥǥ�������ϰ���˥����ͥ��㤬���뤳�Ȥ��ޤ�������ϤԤä���Ťʤ�ޤ��������ޥץ����֤������ͥ���˶ᤤ����˿��椬�������Ф��졢�֤��夬������ɽ������뤳�Ȥ�����ޤ���
���ε����Τ˥ԥ�ݥ���ȥե�������������ץ����֤֤���褦�˥�������쵤��ʣ���Υץ����֤����õ�η�̤����ƹʤ���ߤޤ���
���ץ����֣��Ĥ�õ�Τ���Ƥ������
�ץ����֤Υ�������ϰϤ����������˱ߤ�ɽ������ޤ�������ϣ��ĤΥץ����֤�Ʊ��ID�Υ����ͥ����õ�Τ��Ƥ�����֤Ǥ���
���ξ��ϡ��ߤε�ƻ��˥����ͥ��㤬��������ʤΤǡ��ߤ٤ƴޤ�褦�˥�������ϰϤ����ꤷ�ޤ��礦�����Ĥ�õ�Τ����궹���ϰϤǹʹ��ߤ���ǽ�Ǥ���
���ץ����֣��Ĥ�õ�Τ���Ƥ������
���ξ��ϣ��ĤΥץ����֤Υ�������ϰϤ����뤢�����������ɽ�����Фޤ���������Ʊ��ID����������ɽ������ޤ�������ϡ������ǷҤ��äƤ��ޤ���
���ξ���ɬ���ۤ�����ʪ�ʤΤǡ���������濴���碌�ƥץ����֤�̩�������ƺƥ�����ޤ��礦��
��''�ץ����֣��İʾ��õ�Τ���Ƥ������
���ξ�硢���İʾ�Υץ����֤ˤ�ä�õ�Τ���Ƥ����ϰ�����֤���������ɽ������ޤ��������ޤǤ����餢�Ȥϥ�������ϰϤ����տ����̤�Ƥ����С������ƺǽ�Ū�ʶ��٤���Ƥ��������ޤǻ��äƤ������Ȥ��Ǥ��ޤ���
�֤�����ץ����֤���߹���褦�����֤�ݻ�������������ϰϤ�Ƥ����ȿ��椬�ɤ�ɤ��ʤäƤ����ޤ���
�ޥå�����ǽ������
�����顼�����ƥ�ޥåפα����ˤϡ����Τ褦�ʥ�������ɽ������Ƥ��ޤ���

��¦�ϡ��ޥåפ夫�鸫���ס���¦�ϡ��ޥåפ����鸫���פΥܥ���Ǥ��������ͥ������֥륯��å�������������֤����ޤ��Ͽ��夫�鸫�ƾ����碌�����˿������鸫�ƹ⤵���碌��С��оݤΥ�������ΰ��֤ˤԤä���ȥץ����֤��濴���碌�뤳�Ȥ��Ǥ��ޤ���
�ޥåפ���¦����֥륯��å����Ƥ�Ʊ�ͤ��ڤ��ؤ����̤�������Τǡ����Ѥ��ޤ��礦��
��¦�ϡ��ޥåפ夫�鸫���ס���¦�ϡ��ޥåפ����鸫���פΥܥ���Ǥ��������ͥ������֥륯��å�������������֤����ޤ��Ͽ��夫�鸫�ƾ����碌�����˿������鸫�ƹ⤵���碌��С��оݤΥ�������ΰ��֤ˤԤä���ȥץ����֤��濴���碌�뤳�Ȥ��Ǥ��ޤ���
�ޥåפ���¦����֥륯��å����Ƥ�Ʊ�ͤ��ڤ��ؤ����̤�������Τǡ����Ѥ��ޤ��礦��
�ץ����֤ˤĤ��Ƥ����μ�
�����ͥ�����������濴�ˤ��ƽФ�
�ץ����֤θ�������
�ץ����֤ϥǥե���ȤǤ����ƤΥץ����֤�Ʊ�������Ǥ��ޤ����ץ����֤Ĥ�������������SHIFT������³�����ɽ�����Ѳ��������̤˾��λ��ꡦ��������ϰϤλ����Ԥ���褦�ˤʤ�ޤ��������������̤˥������ѹ����Ǥ��ʤ��ΤǤ��ޤ��̣�Ϥ���ޤ���
| SHIFT���Ƥ��ʤ����� |
 |
| SHIFT���Ƥ������ |
 |
�ץ����֤���ɸ��ª���벻
�ץ����֤�ư�����ȡ֥��롦�����פȤ��������ʲ������ޤ��������ɽ������Ƥ��륷���ͥ���ʼºݤΰ��֤ǤϤʤ�����¿���Υץ����֤��ϰϤ������ۤɹ⤯�ʤ�ޤ���
�ڤ�ư�����Ʋ���ʹ�����ȤǼ㴳�����Ť餤�褦�ʰ��֤Υ����ͥ����Ū�Τ�ª���뤳�Ȥ��Ǥ��ޤ���
�ڤ�ư�����Ʋ���ʹ�����ȤǼ㴳�����Ť餤�褦�ʰ��֤Υ����ͥ����Ū�Τ�ª���뤳�Ȥ��Ǥ��ޤ���
�������
�ץ����֤Υե��������ʤ���ư���֤Ǥ�����
���Ф⥷���ͥ��㰷���ǡ��ץ����֤�ɬ�פǤ����ʺ��Ϻǽ餫���ײ�ǽ�Ǥ��ˡ�
���Ф⥷���ͥ��㰷���ǡ��ץ����֤�ɬ�פǤ����ʺ��Ϻǽ餫���ײ�ǽ�Ǥ��ˡ�
�������֤ȥ�����ʡ�
�������֤�ư���Ƥ���֡ʤ��뤤�ϥ�����ľ��μ��þ��֤δ֡ˤϡ��ץ����֤�ȯ�͡��ץ����֤β�����ץ����֥����㡼�ؤΥ�����ɤ��Ǥ��ޤ���
��������ȯ�ͤ��Ƥ���ץ����֤����ƥ�����뤳�Ȥϲ�ǽ�Ǥ������ۡ�����֤ʤɤδ������ӤǤϡ��ץ����֤�Ÿ�����Ƽ�ʬ�ϼ��ä��������ͥ����ޤ������ꤹ�롦�����Ȥ����Τ�����ˤʤäƤ��ޤ���
��������ȯ�ͤ��Ƥ���ץ����֤����ƥ�����뤳�Ȥϲ�ǽ�Ǥ������ۡ�����֤ʤɤδ������ӤǤϡ��ץ����֤�Ÿ�����Ƽ�ʬ�ϼ��ä��������ͥ����ޤ������ꤹ�롦�����Ȥ����Τ�����ˤʤäƤ��ޤ���
�����������ͥ���νи��ˤĤ���
2022ǯ11�� ���åץǡ������鿷�����ð����䱧��Υ����ͥ��㤬�����˽и�����ȡ��ץ����֥�����ʡ�������ɥ������Τ��Ф�褦�ˤʤ�ޤ������ޤ����㤤�����Ĥ�褦�Ǥ���
�ȥåץڡ��������
��
�ȥåץڡ��������
��

�����Ȥ�